
Photoelectric Sensors
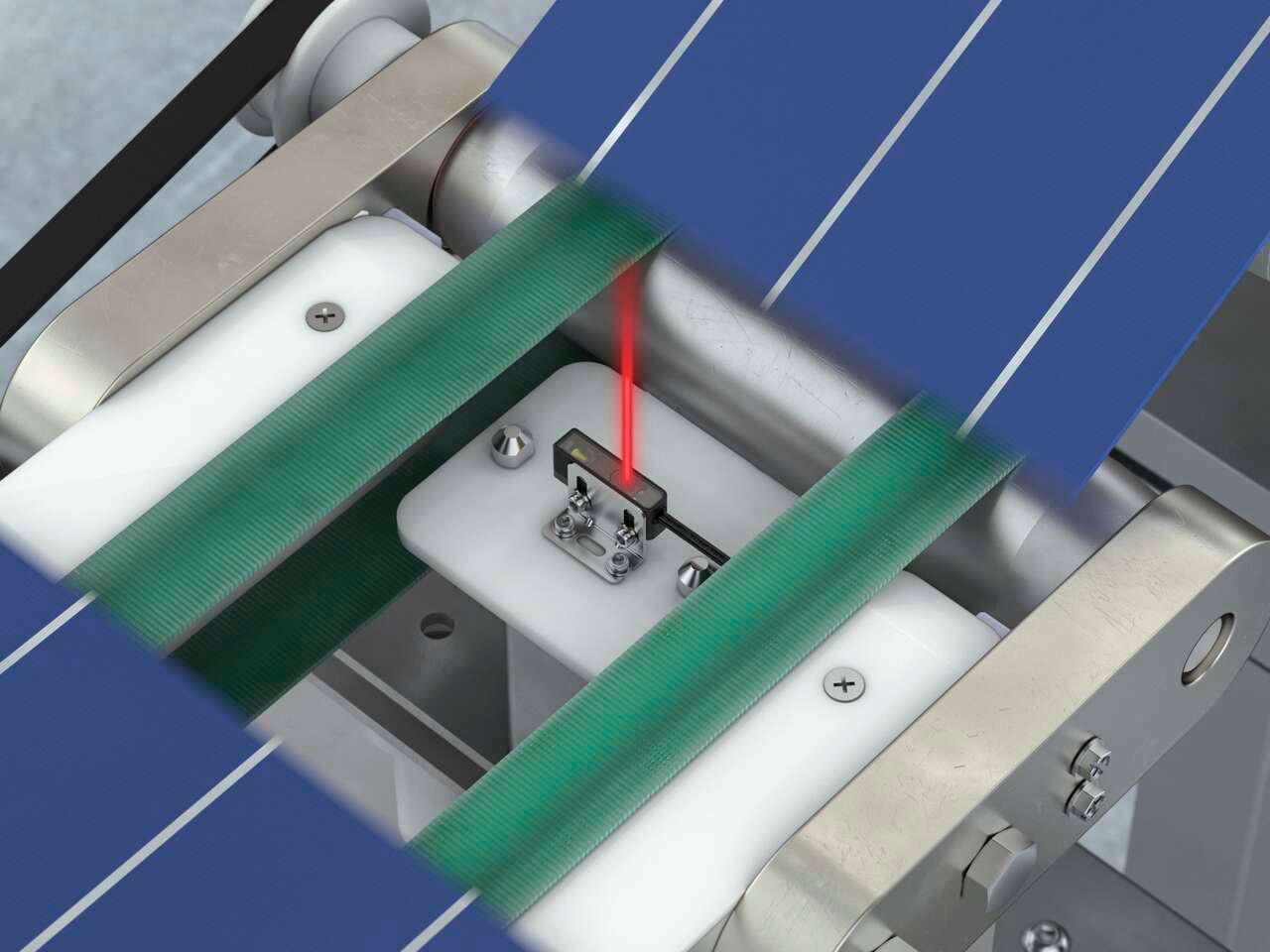
Photoelectric sensors, or photo eyes, emit a beam of light that detects the presence or absence of items and equipment or changes in surface conditions.
| Series Image | Series Name | Opposed Range (m) | Non-polarized Retroreflective Range (m) | Polarized Retroreflective Range (m) | Laser Polarized Retroreflective Range (m) | Diffuse Range (mm) | Fixed-Field Range (mm) | Adjustable-Field Range (mm) | Type of Emitter | Housing Material | IP Rating | Response Time (μs) | Operating Temperature | IO-Link | Clear Object Detection |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
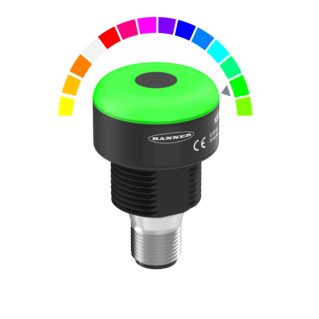
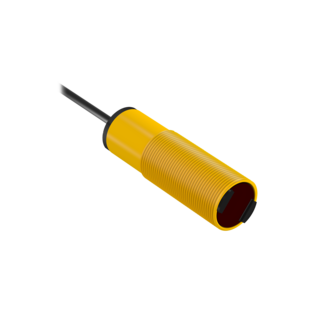
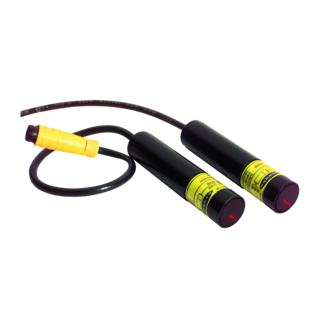
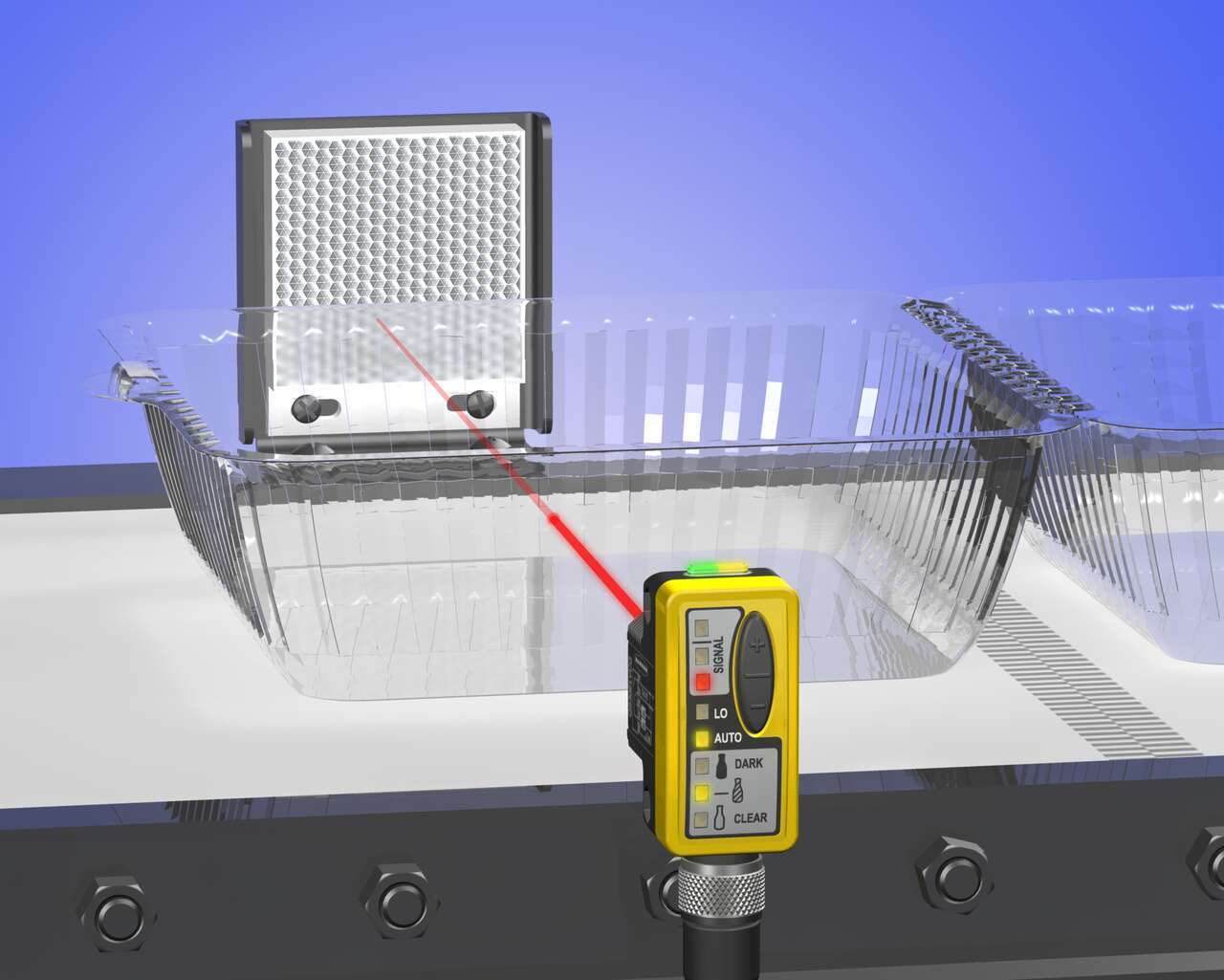
Series Image  |
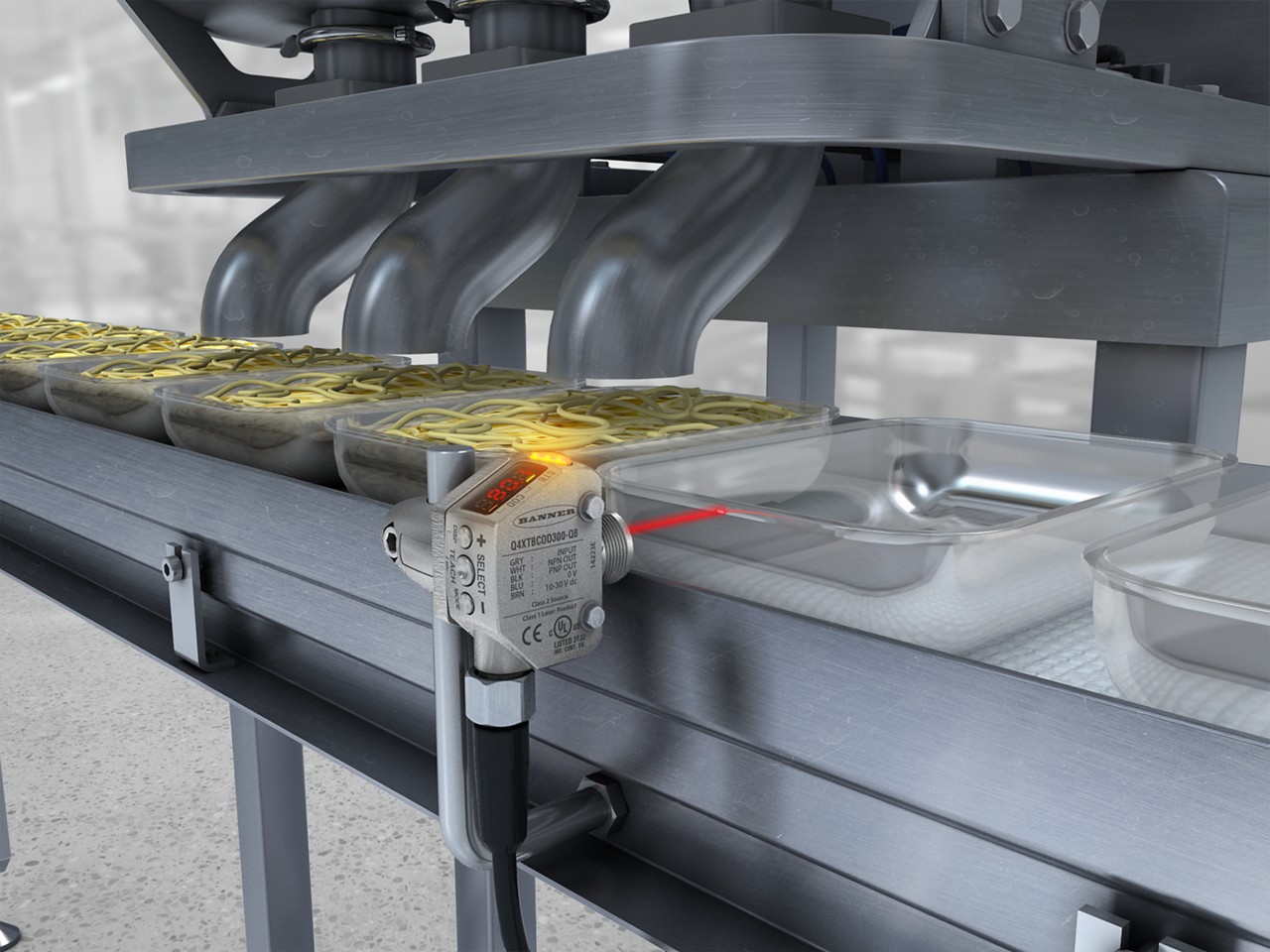
Series Name QS18 | Opposed Range (m) 20 | Non-polarized Retroreflective Range (m) 6.5 | Polarized Retroreflective Range (m) 3.5 | Laser Polarized Retroreflective Range (m) 10 | Diffuse Range (mm) 600 | Fixed-Field Range (mm) 150 | Adjustable-Field Range (mm) 350 | Type of Emitter LED and Laser | Housing Material Plastic | IP Rating IP67 | Response Time (μs) 600–800 | Operating Temperature -20 to +70 °C | IO-Link ✅ YES | Clear Object Detection ✅ YES |
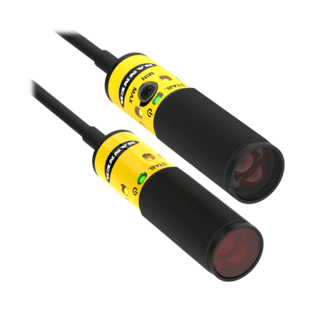
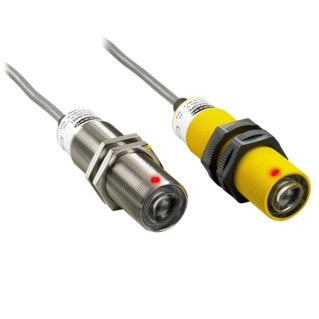
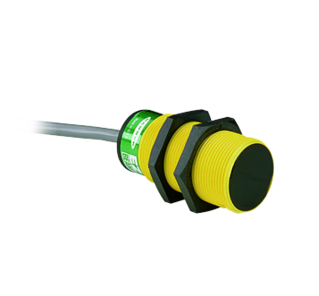
Series Image  |
Series Name Q20-2 | Opposed Range (m) — | Non-polarized Retroreflective Range (m) — | Polarized Retroreflective Range (m) 5 | Laser Polarized Retroreflective Range (m) — | Diffuse Range (mm) — | Fixed-Field Range (mm) — | Adjustable-Field Range (mm) 3000 | Type of Emitter LED and Laser | Housing Material Plastic | IP Rating IP67 | Response Time (μs) 600 | Operating Temperature -25 to +70 °C | IO-Link 🚫 NO | Clear Object Detection 🚫 NO |
Series Image  |
Series Name Q20 | Opposed Range (m) 20 | Non-polarized Retroreflective Range (m) 6 | Polarized Retroreflective Range (m) 4 | Laser Polarized Retroreflective Range (m) — | Diffuse Range (mm) 1500 | Fixed-Field Range (mm) 150 | Adjustable-Field Range (mm) 400 | Type of Emitter LED | Housing Material Plastic | IP Rating IP67 | Response Time (μs) 850–1000 | Operating Temperature -20 to +60 °C | IO-Link ✅ YES | Clear Object Detection 🚫 NO |
Series Image  |
Series Name QS30 | Opposed Range (m) 60 | Non-polarized Retroreflective Range (m) 12 | Polarized Retroreflective Range (m) 8 | Laser Polarized Retroreflective Range (m) 18 | Diffuse Range (mm) 1400 | Fixed-Field Range (mm) 600 | Adjustable-Field Range (mm) 600 | Type of Emitter LED and Laser | Housing Material Plastic | IP Rating IP67 | Response Time (μs) 2000–5000 | Operating Temperature -20 to +70 °C | IO-Link 🚫 NO | Clear Object Detection ✅ YES |
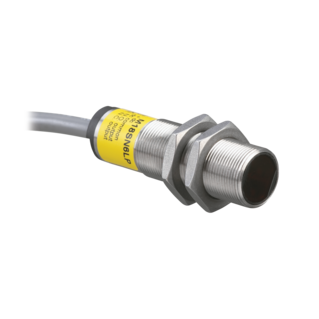
Series Image  |
Series Name T18-2 | Opposed Range (m) 25 | Non-polarized Retroreflective Range (m) — | Polarized Retroreflective Range (m) 6 | Laser Polarized Retroreflective Range (m) — | Diffuse Range (mm) 750 | Fixed-Field Range (mm) 200 | Adjustable-Field Range (mm) — | Type of Emitter LED | Housing Material Plastic | IP Rating IP67, IP68, IP69K | Response Time (μs) 1500–2000 | Operating Temperature -40 to +70 °C | IO-Link 🚫 NO | Clear Object Detection 🚫 NO |
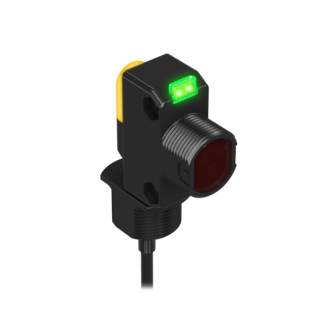
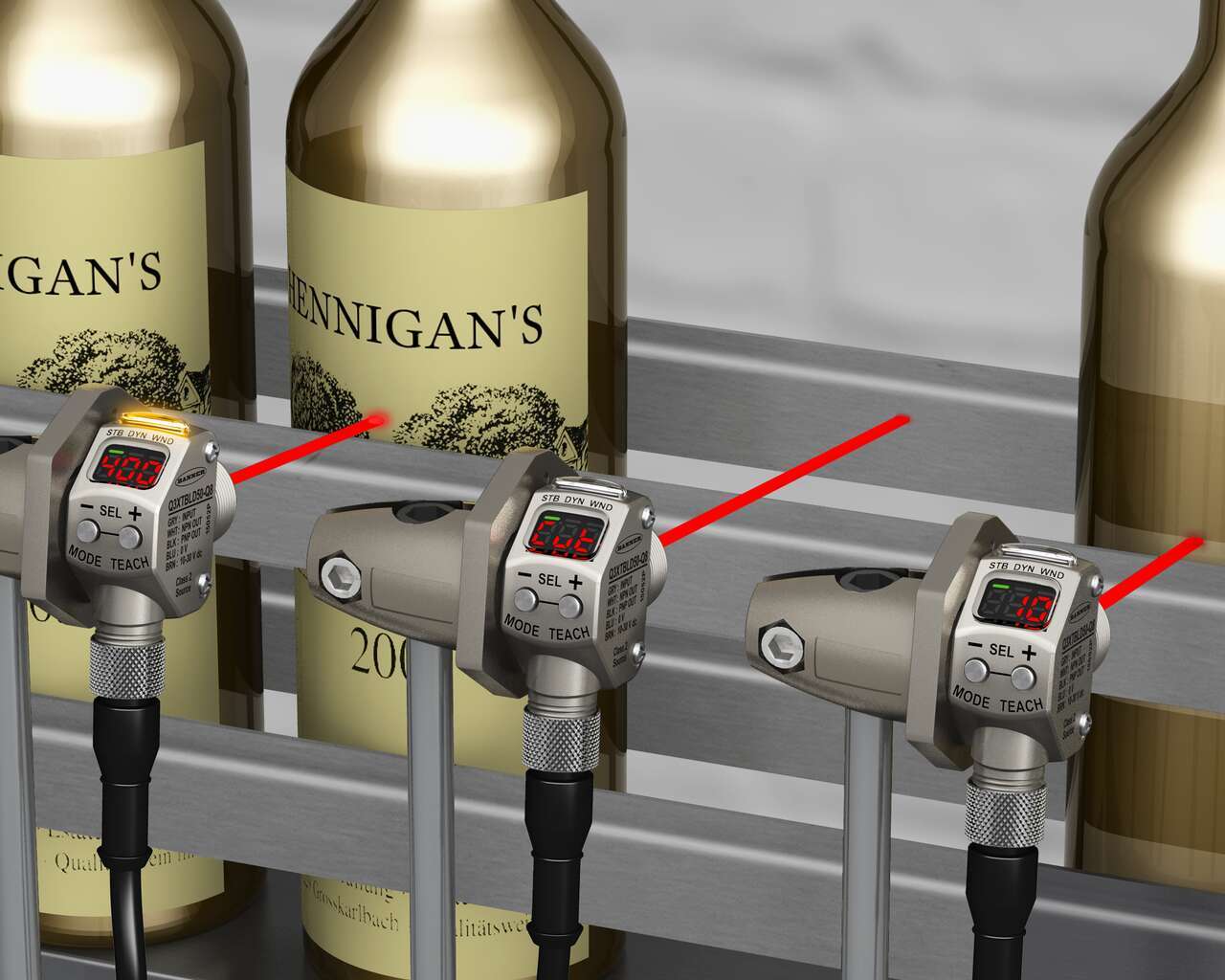
Series Image  |
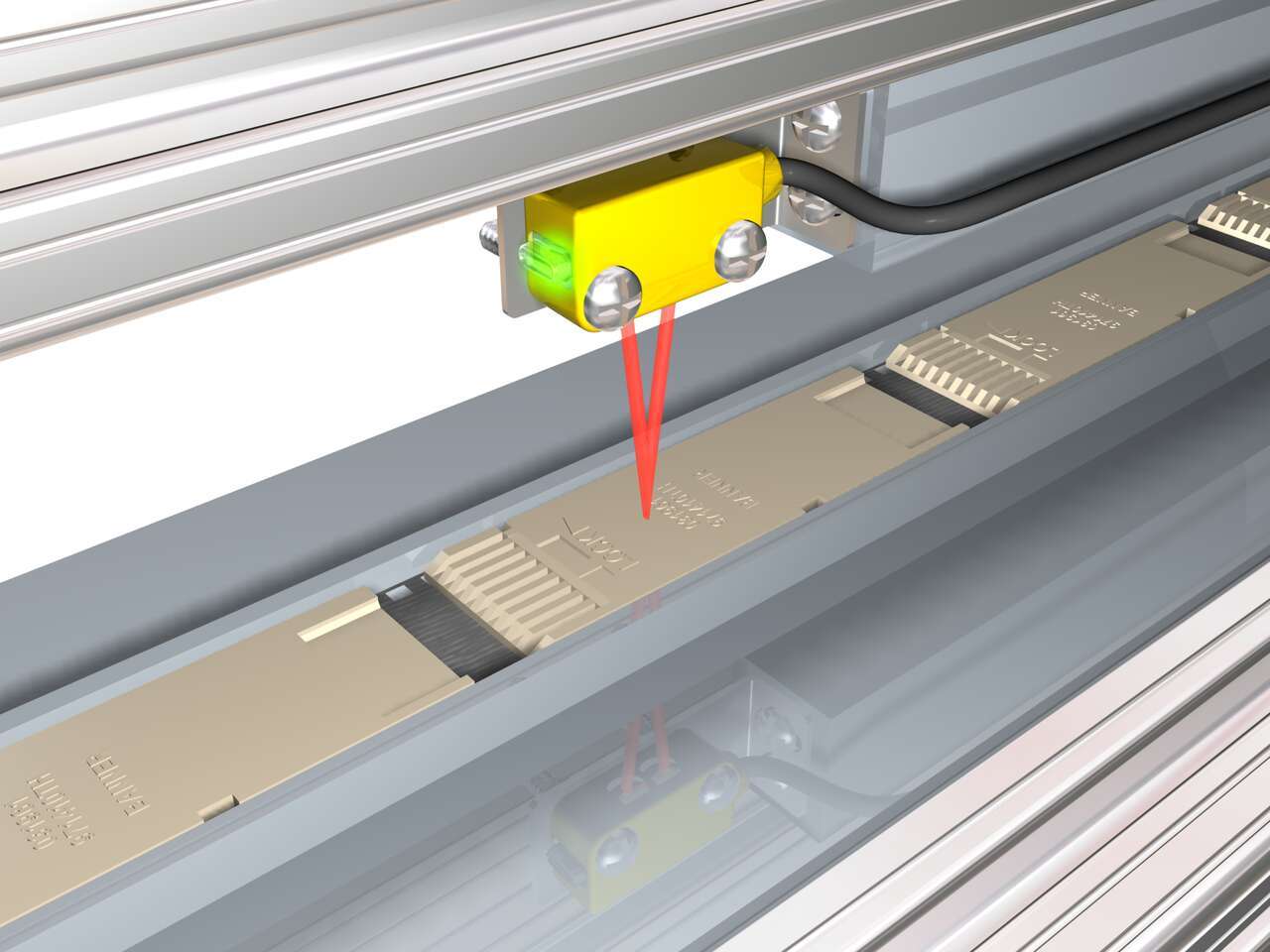
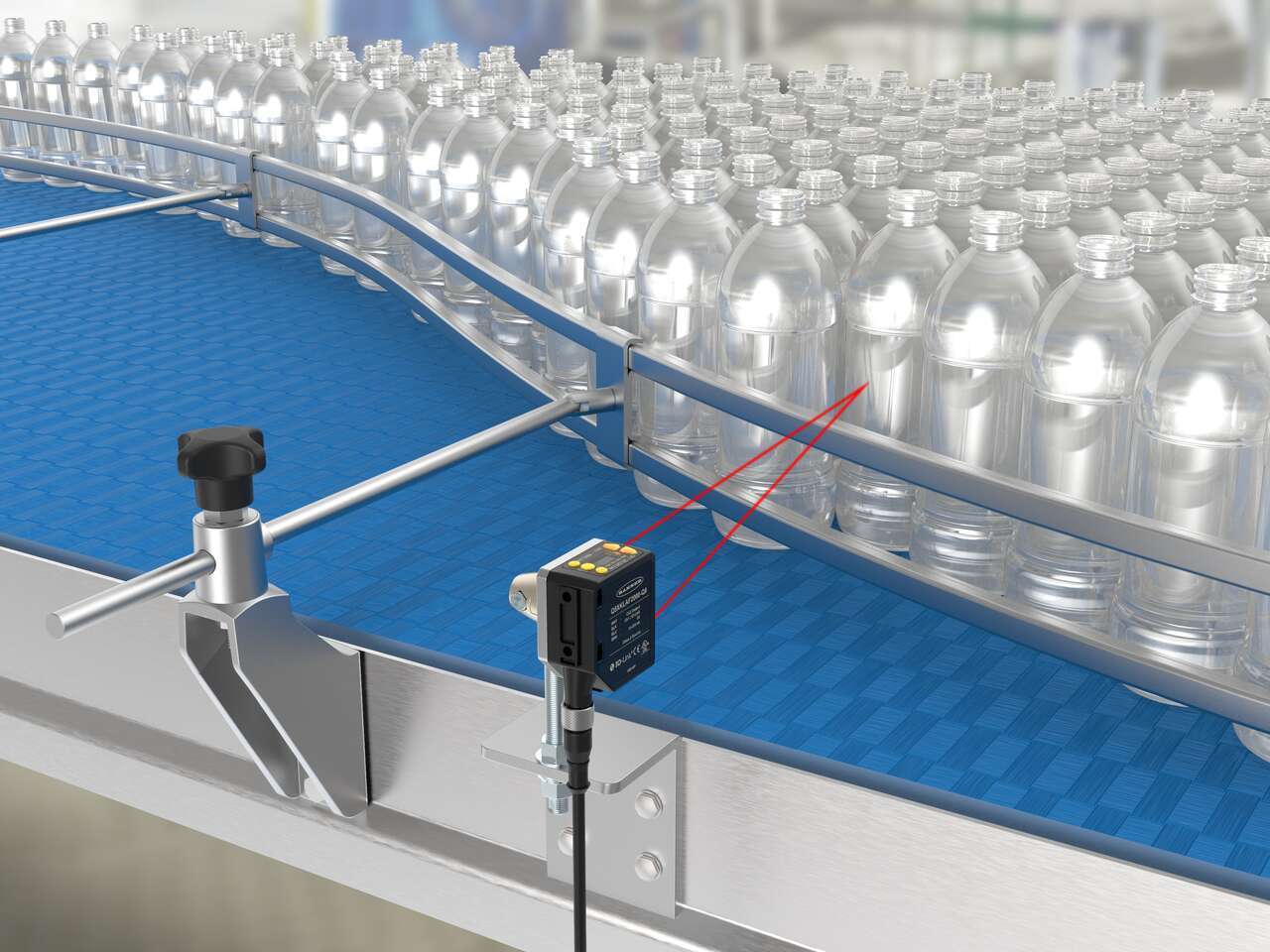
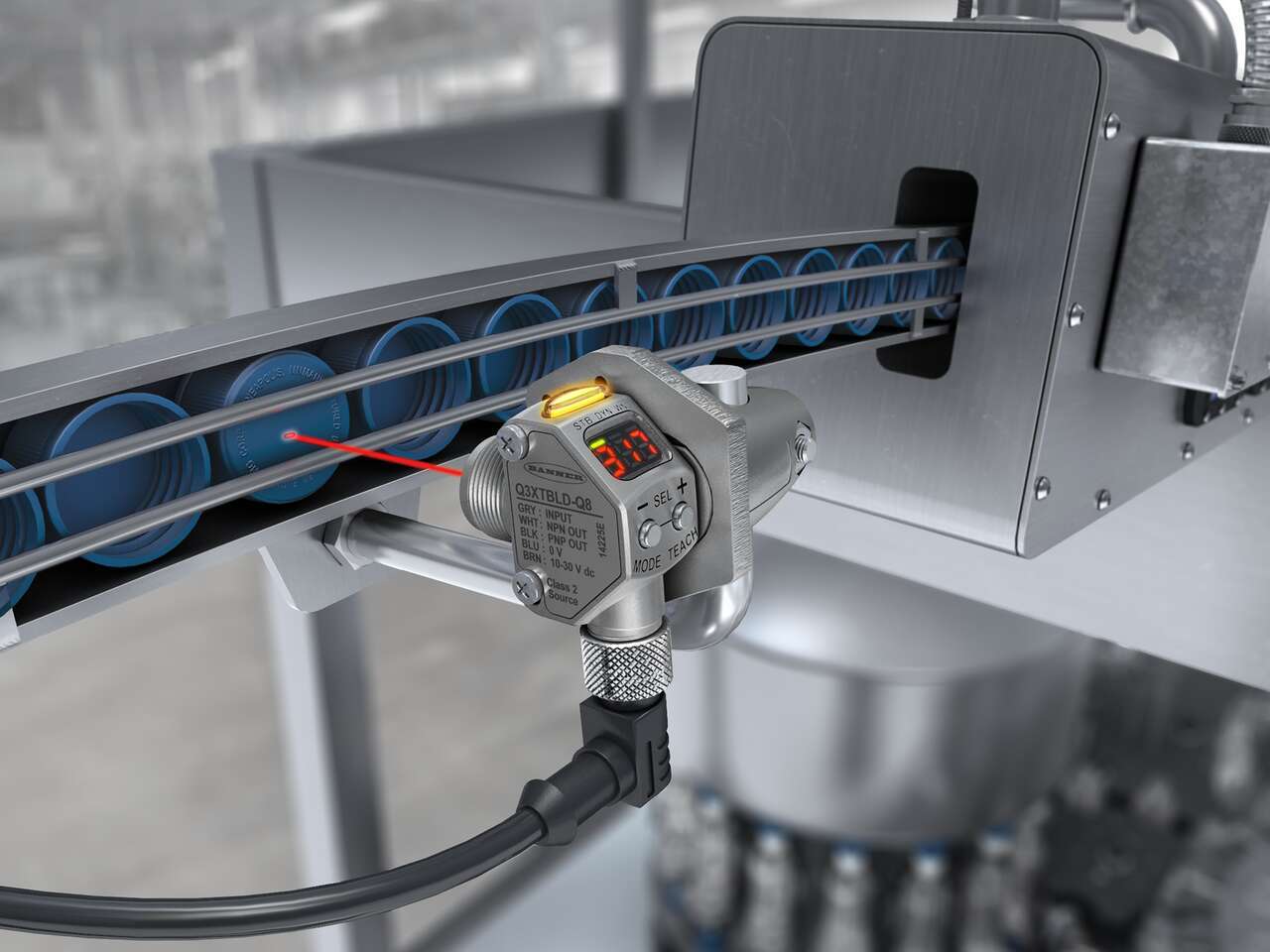
Series Name Q3X | Opposed Range (m) — | Non-polarized Retroreflective Range (m) — | Polarized Retroreflective Range (m) — | Laser Polarized Retroreflective Range (m) — | Diffuse Range (mm) 300 | Fixed-Field Range (mm) 200 | Adjustable-Field Range (mm) — | Type of Emitter Laser | Housing Material Metal | IP Rating IP67, IP68, IP69K | Response Time (μs) 250 | Operating Temperature -10 to +50 °C | IO-Link 🚫 NO | Clear Object Detection 🚫 NO |
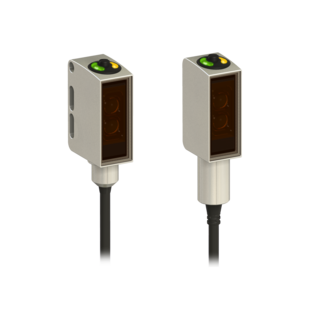
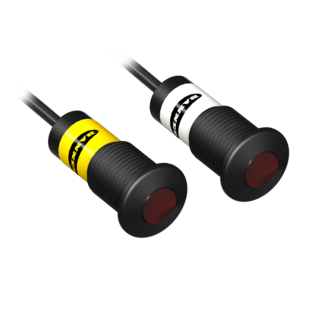
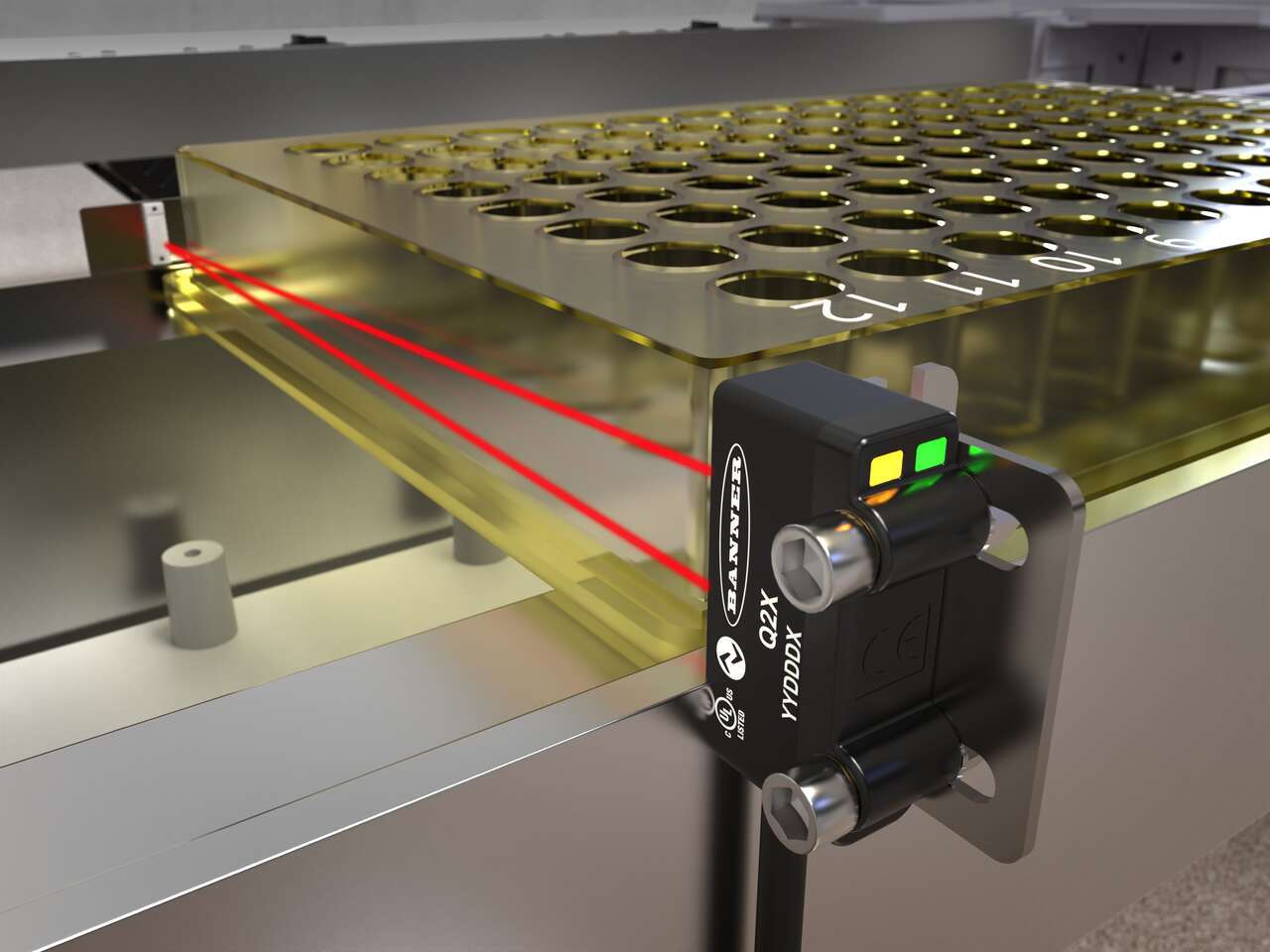
Series Image  |
Series Name Q2X | Opposed Range (m) 3 | Non-polarized Retroreflective Range (m) — | Polarized Retroreflective Range (m) 3.3 | Laser Polarized Retroreflective Range (m) — | Diffuse Range (mm) — | Fixed-Field Range (mm) 50 | Adjustable-Field Range (mm) 3000 | Type of Emitter LED and Laser | Housing Material Plastic | IP Rating IP67 | Response Time (μs) 600–100,000 | Operating Temperature -25 to +50 °C | IO-Link ✅ YES | Clear Object Detection ✅ YES |
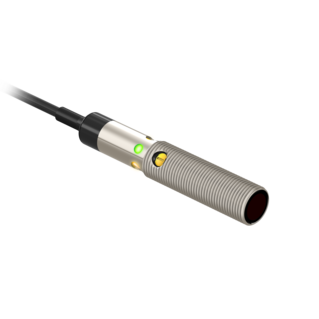
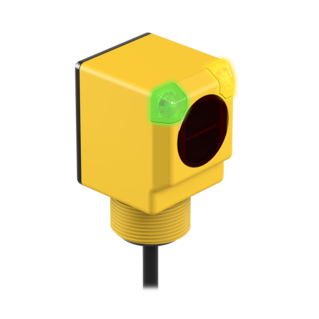
Series Image  |
Series Name Q2F | Opposed Range (m) — | Non-polarized Retroreflective Range (m) — | Polarized Retroreflective Range (m) — | Laser Polarized Retroreflective Range (m) — | Diffuse Range (mm) — | Fixed-Field Range (mm) 45 | Adjustable-Field Range (mm) — | Type of Emitter LED | Housing Material Plastic | IP Rating IP65 | Response Time (μs) 850 | Operating Temperature -25 to +55 °C | IO-Link 🚫 NO | Clear Object Detection 🚫 NO |



































Photoelectric Applications
-
Dark Wafer Presence Detection
-
Accurate Positioning in Medical & Scientific Laboratories
-
Streamline Labeling Process with a Fixed-Field Sensor
-

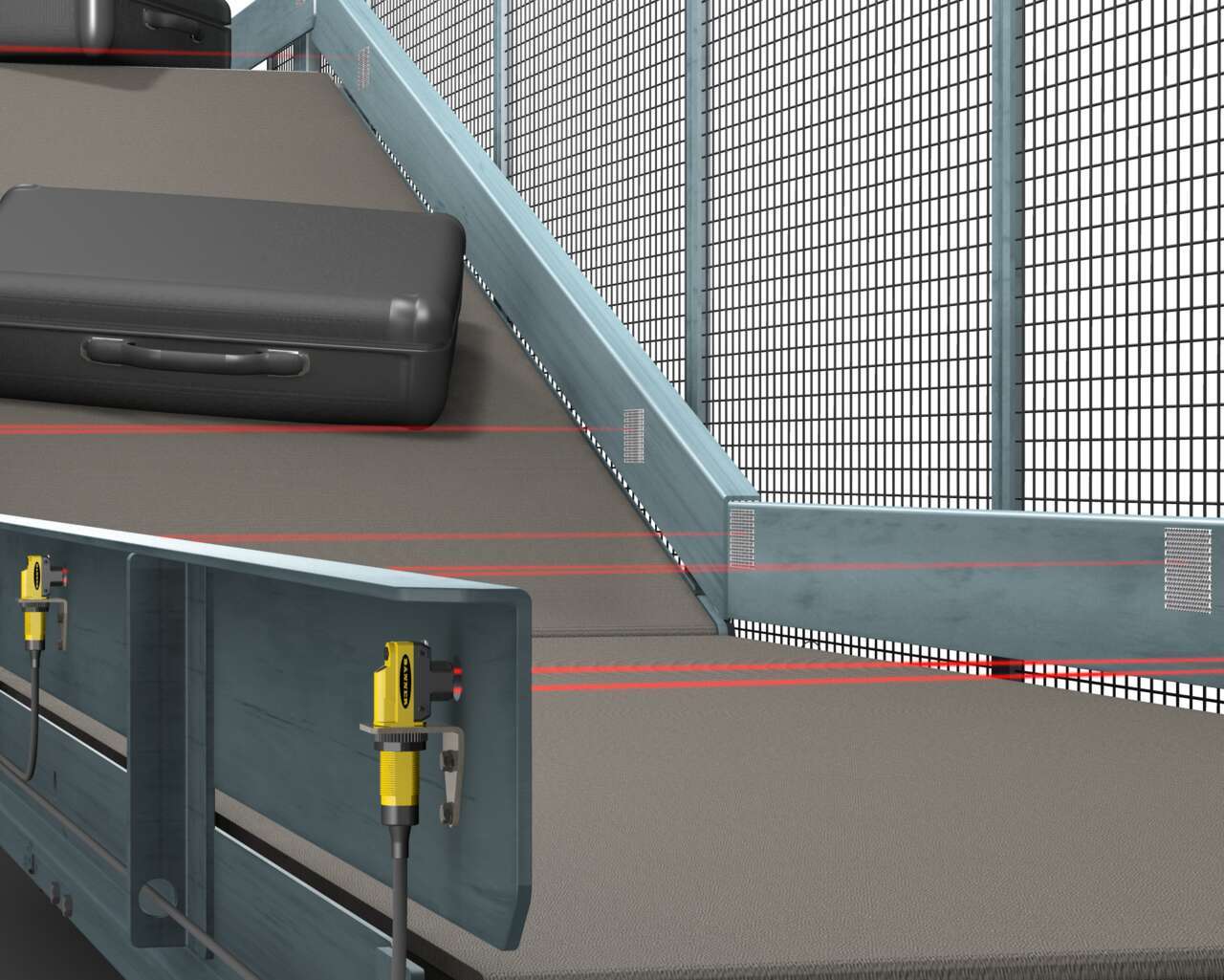
Preventing Jams in Airport Baggage Retrieval Systems
-

Status Indication on Airport Conveyor
-

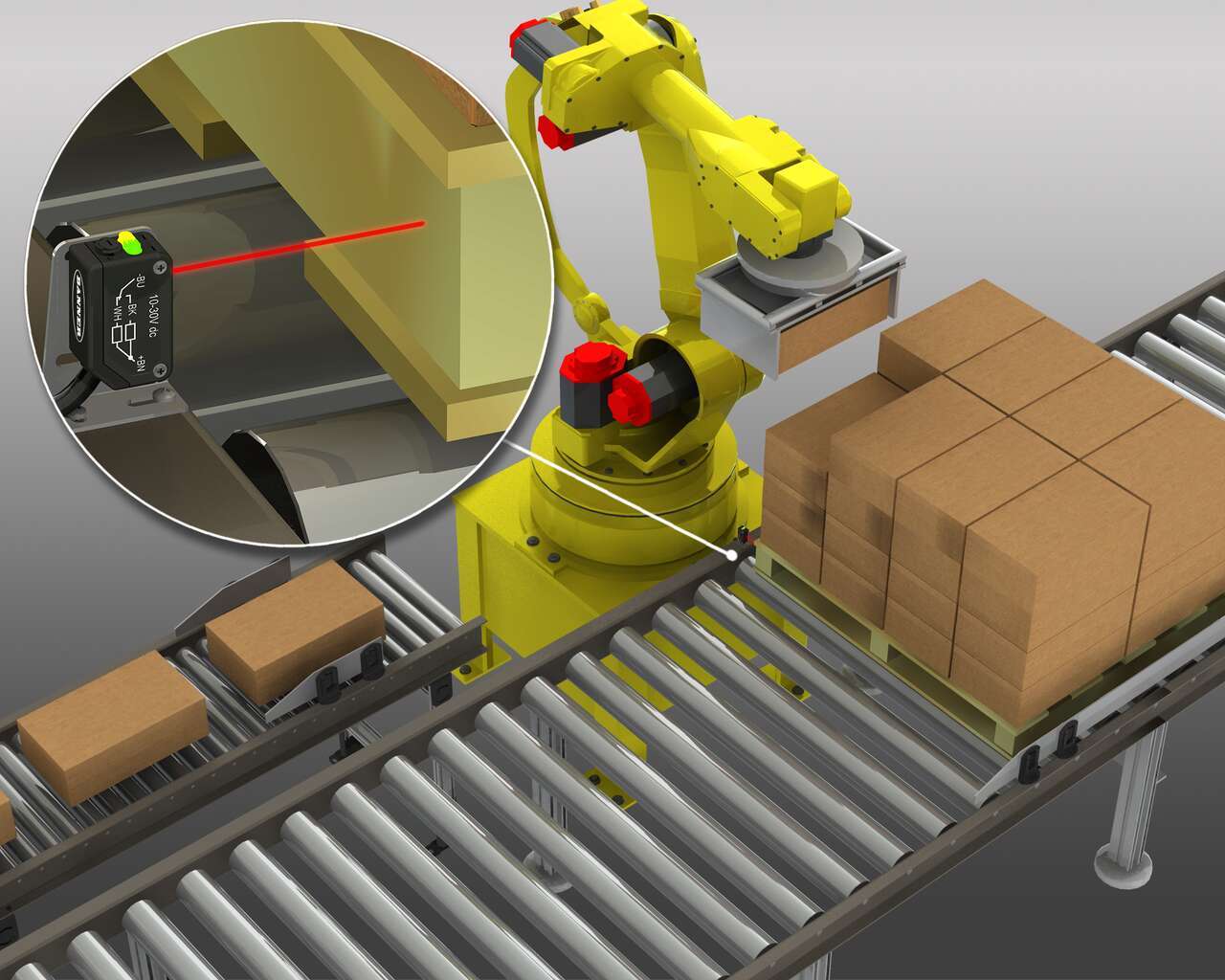
Positioning Pallets for Unloading by Robot Arms
-

Illuminated Forklift Guidance
-

Jam Detection on a Conveyor with Only AC Power
-

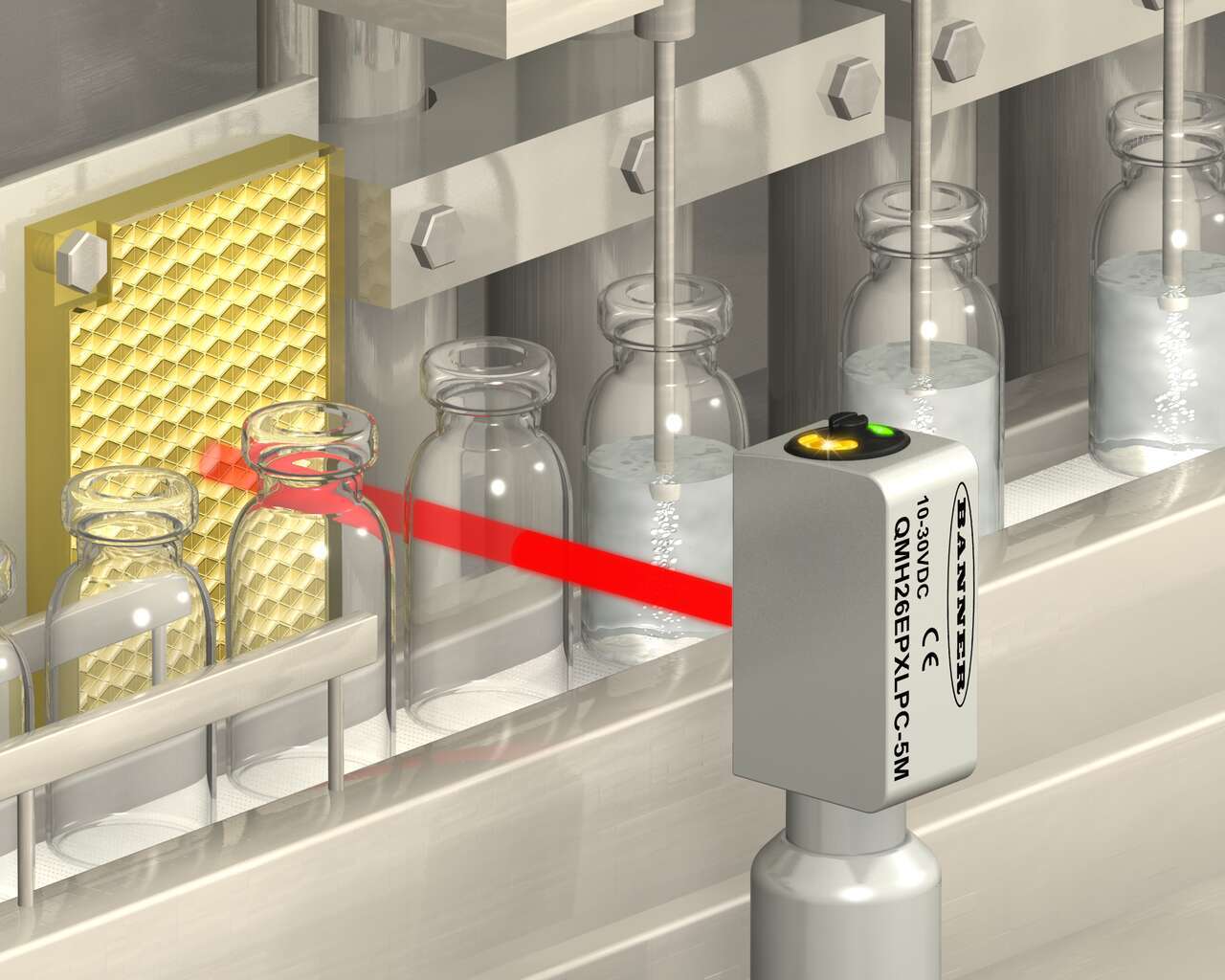
Reliable Detection of Transparent Bottles on Conveyor
-
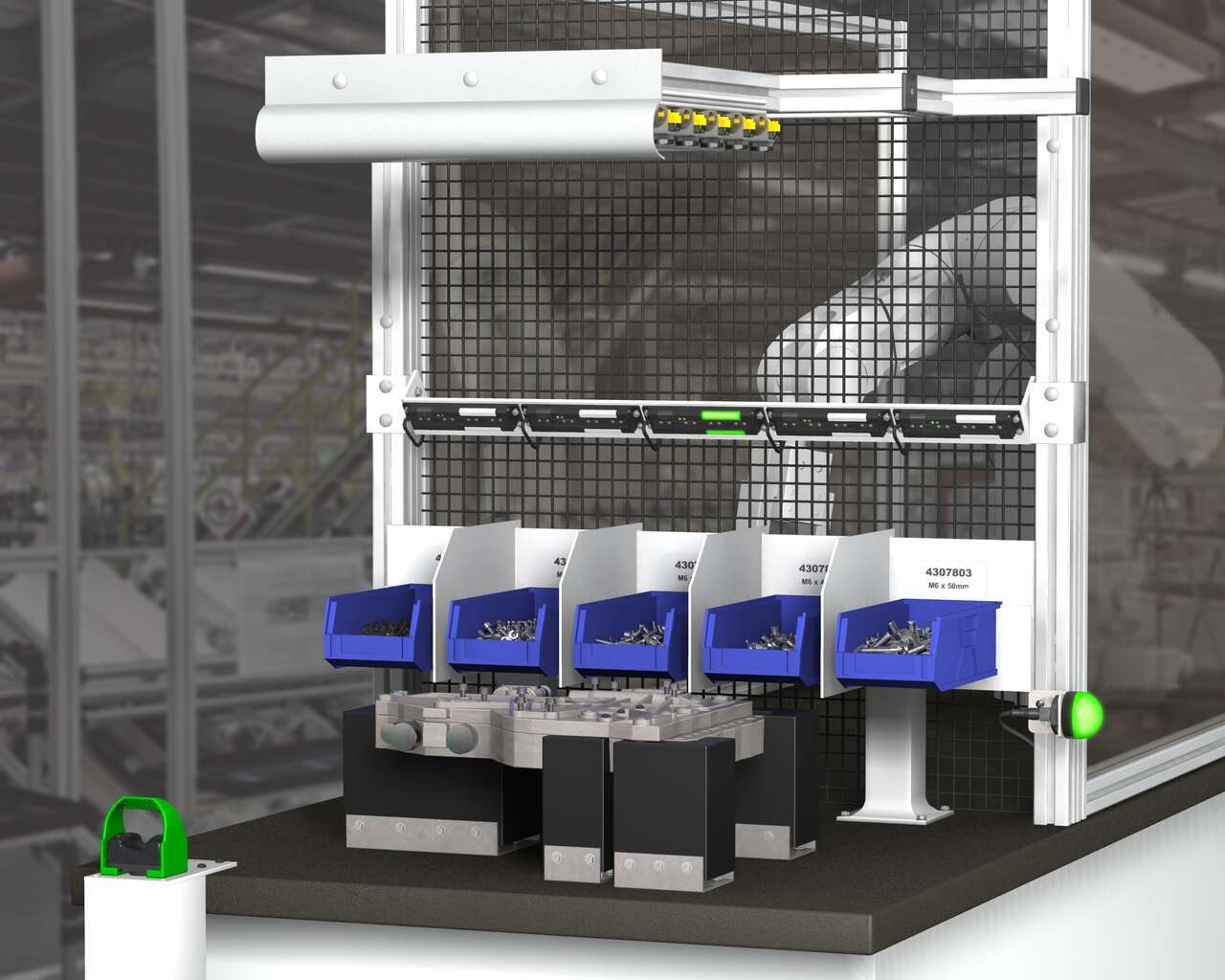
Operator Guidance Solution
-

Shrink Sleeve Labeling at High Speeds
-

Blue LED Sensor Detects Amber Bottles
-
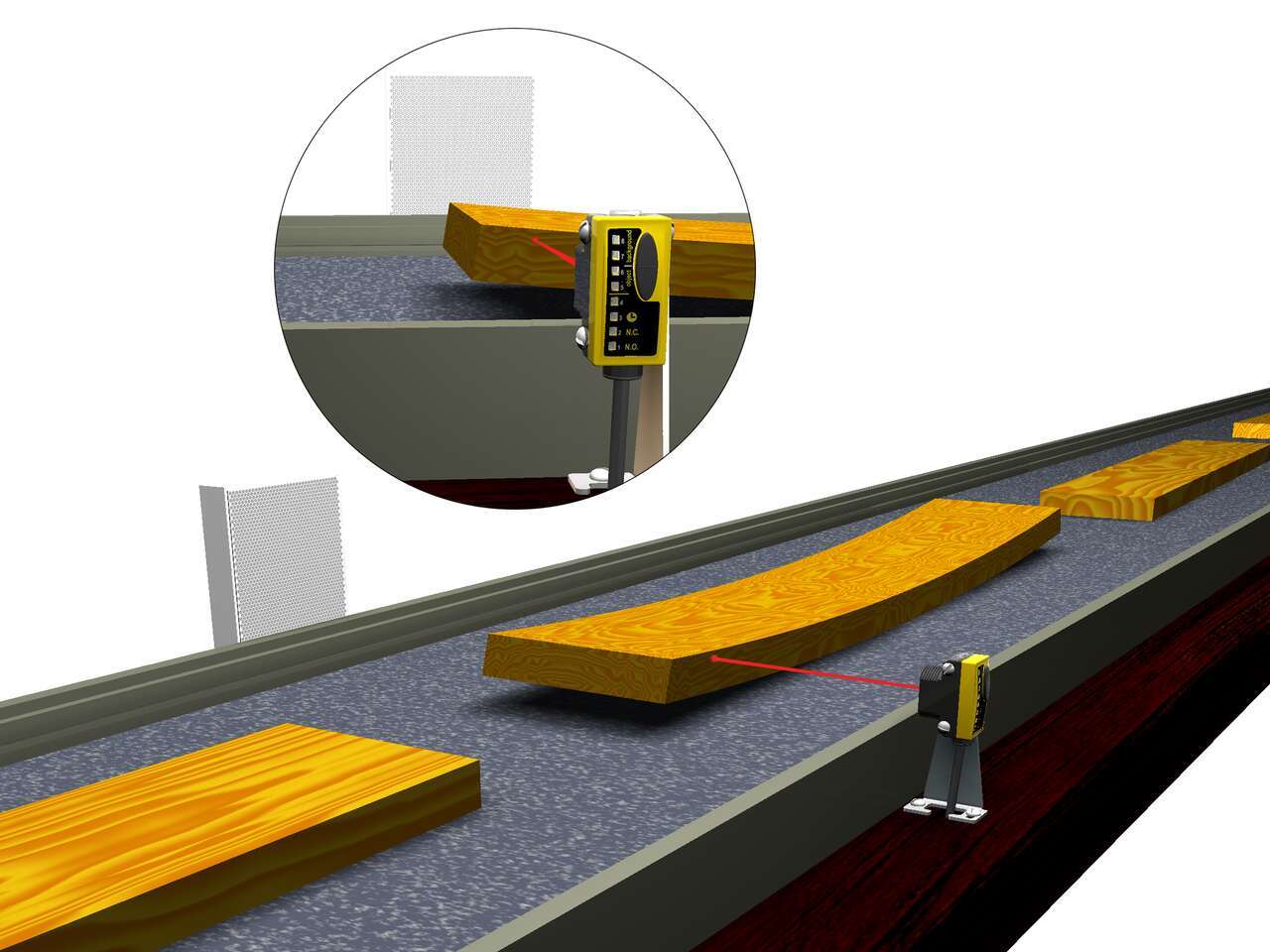
Board Warp Detection with a QS30
-
Load Station Pallet Detection
-
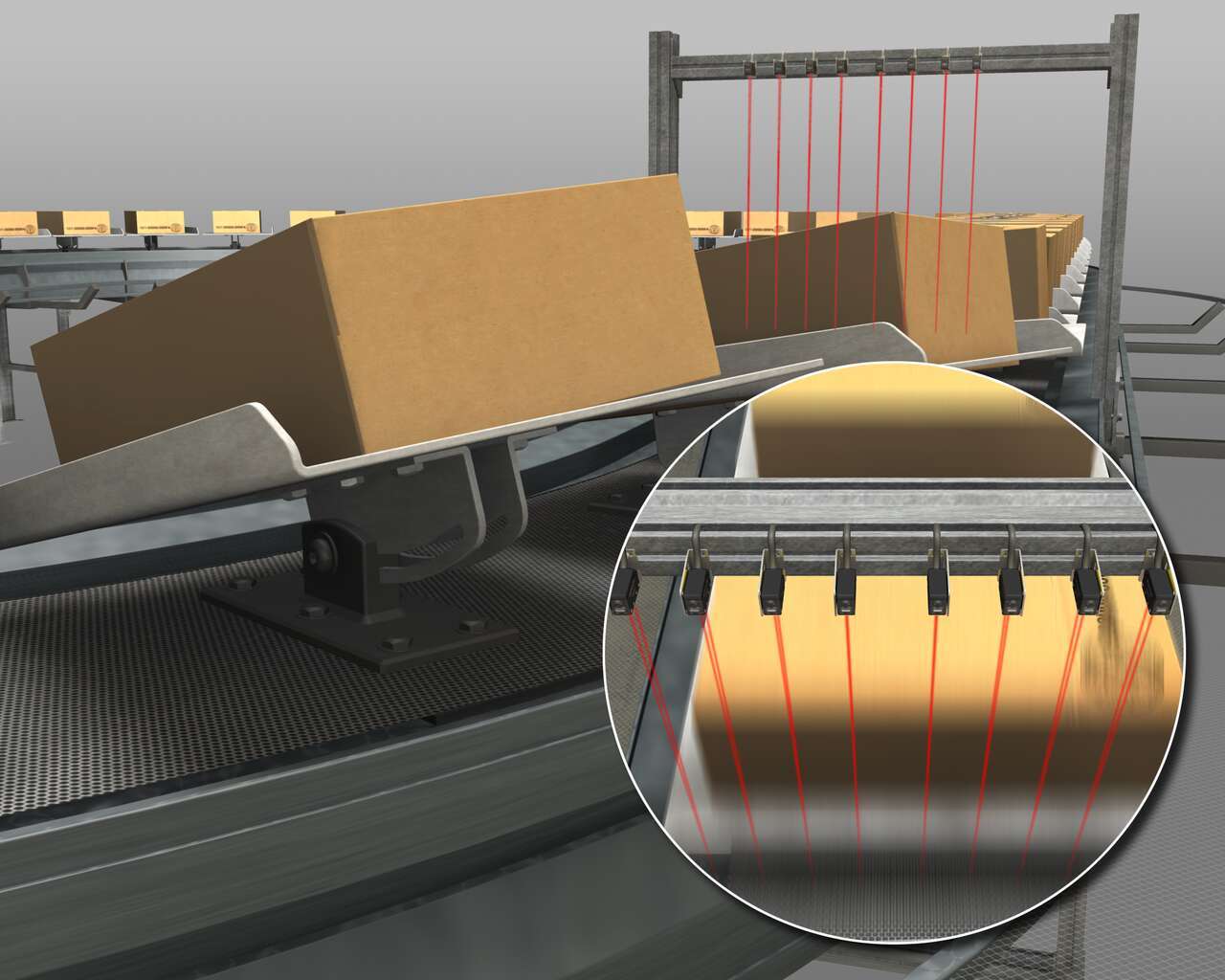
Objects on a Conveyor
-
Glass Vial Detection: Hygienic Sensors in Harsh Chemicals
-

Clear and Reflective Targets
-
Part-in-Place Verification
-

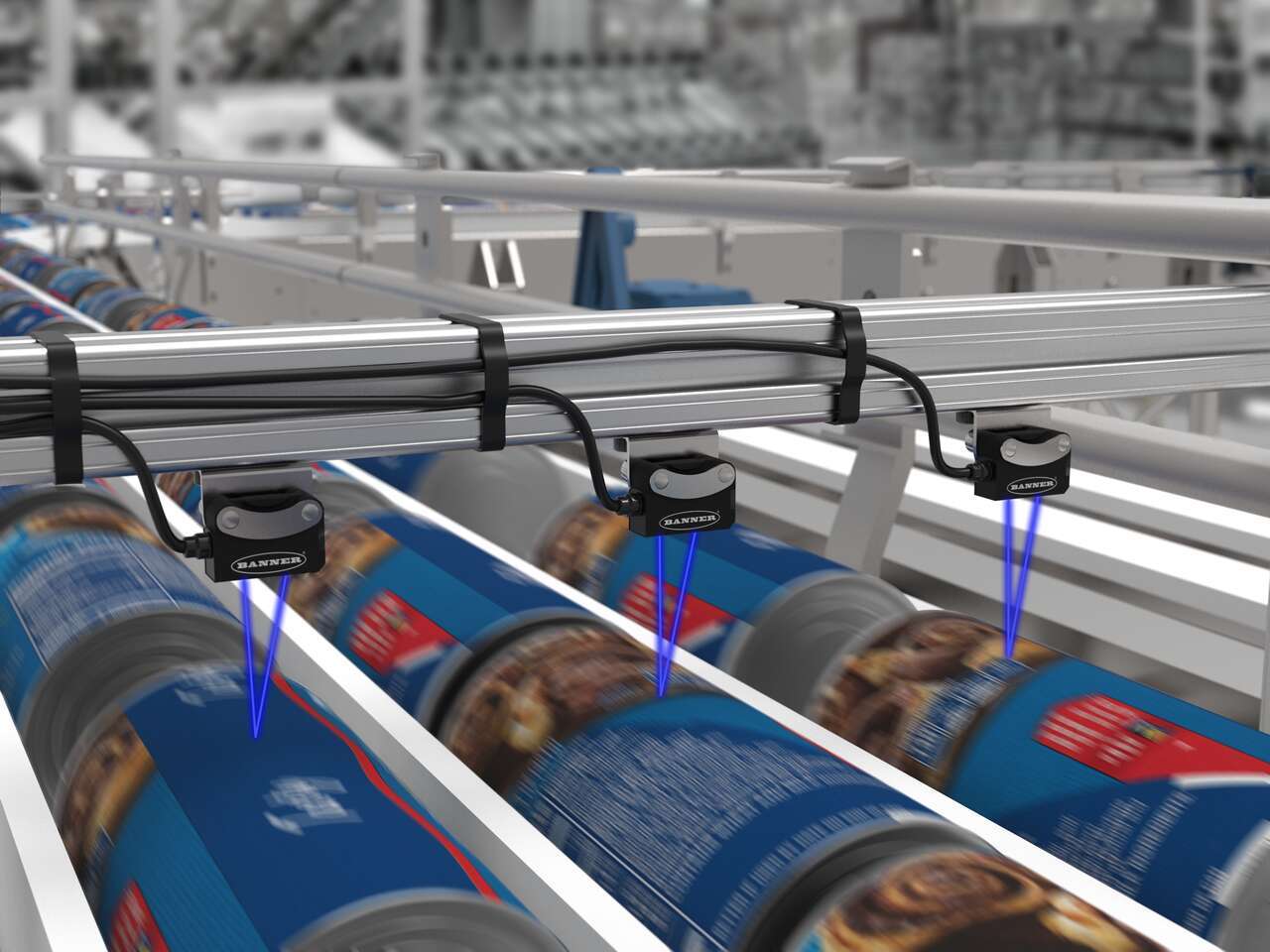
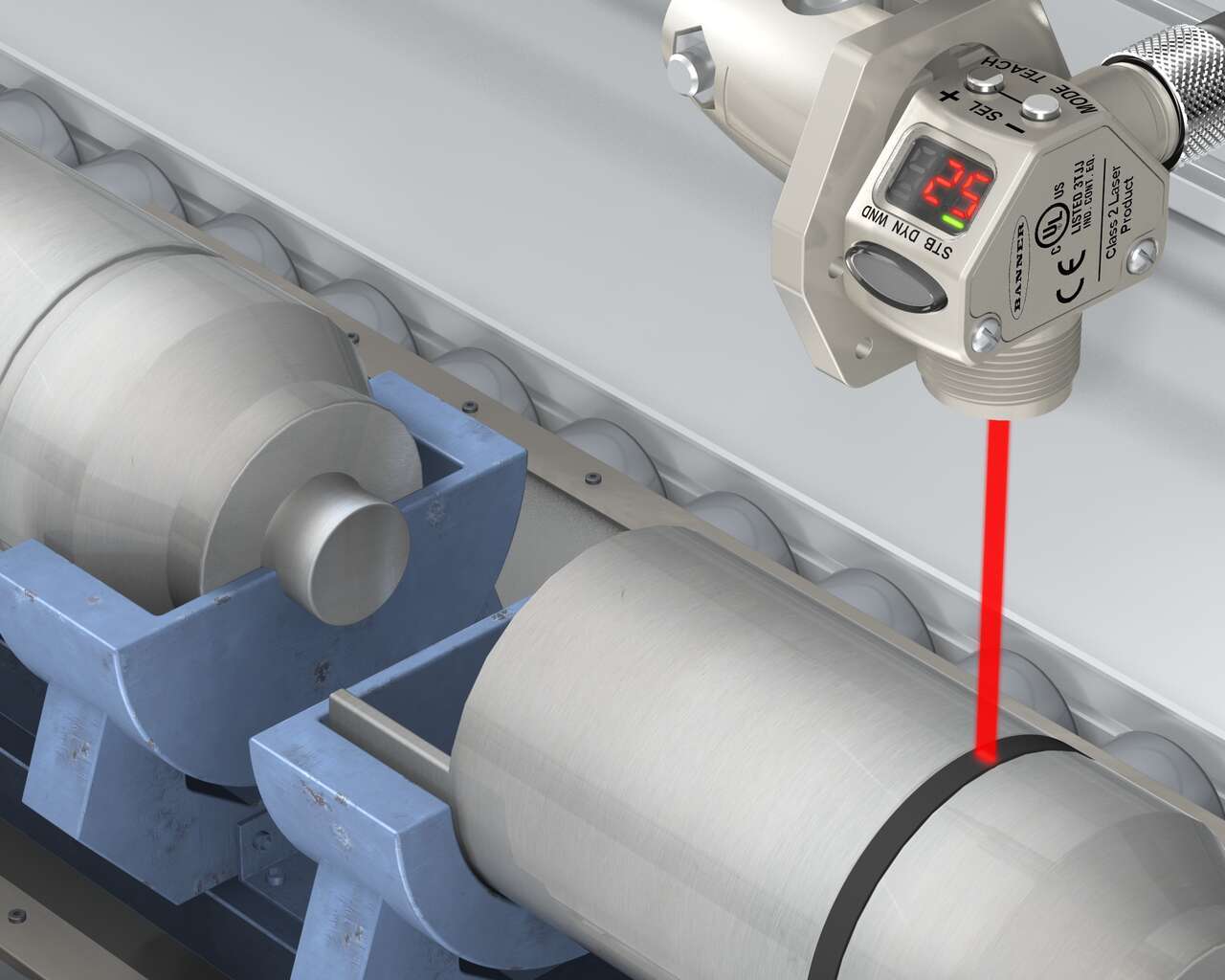
Counting Reflective Rings
-

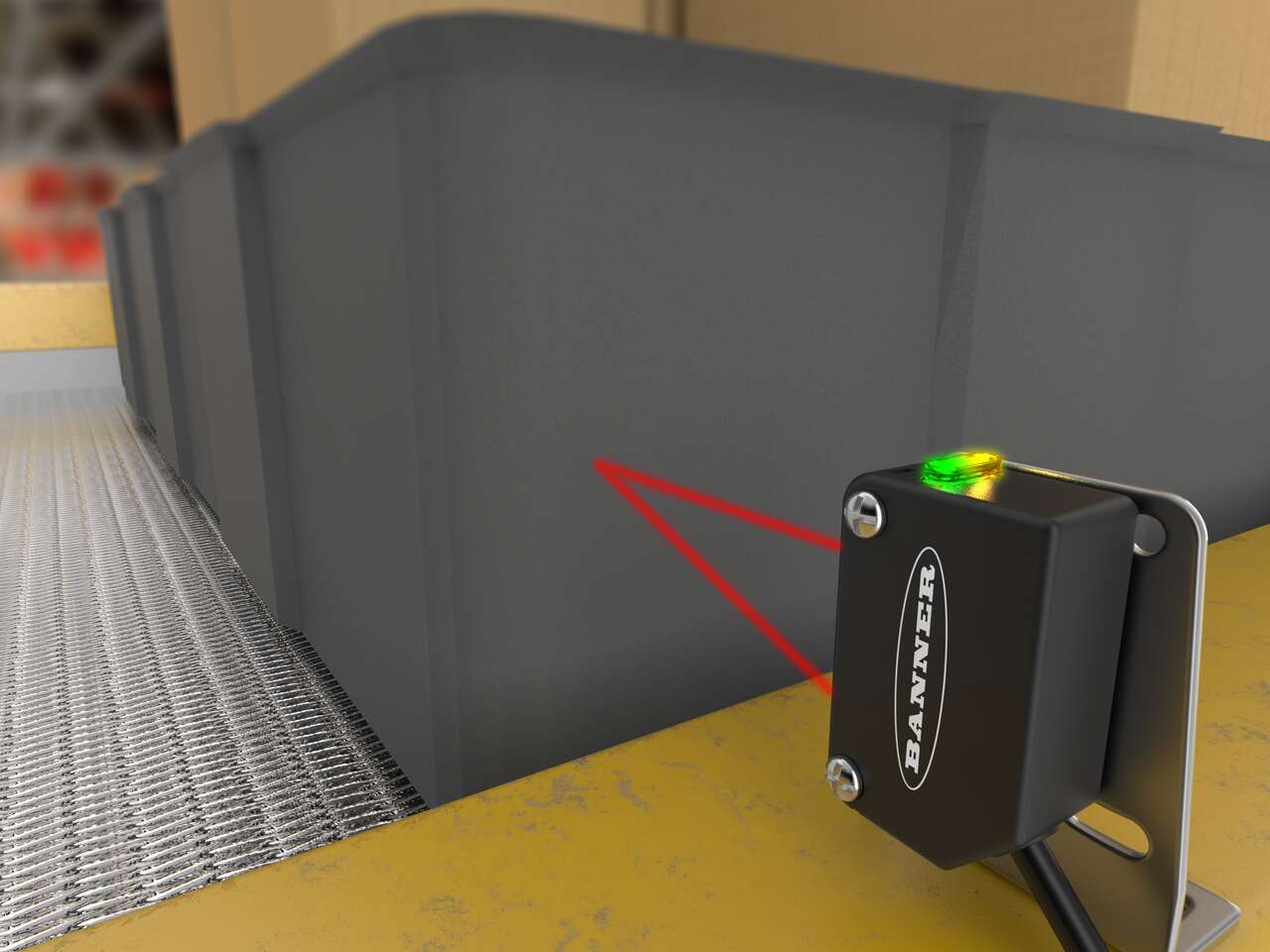
Dark and Low Contrast Targets
-

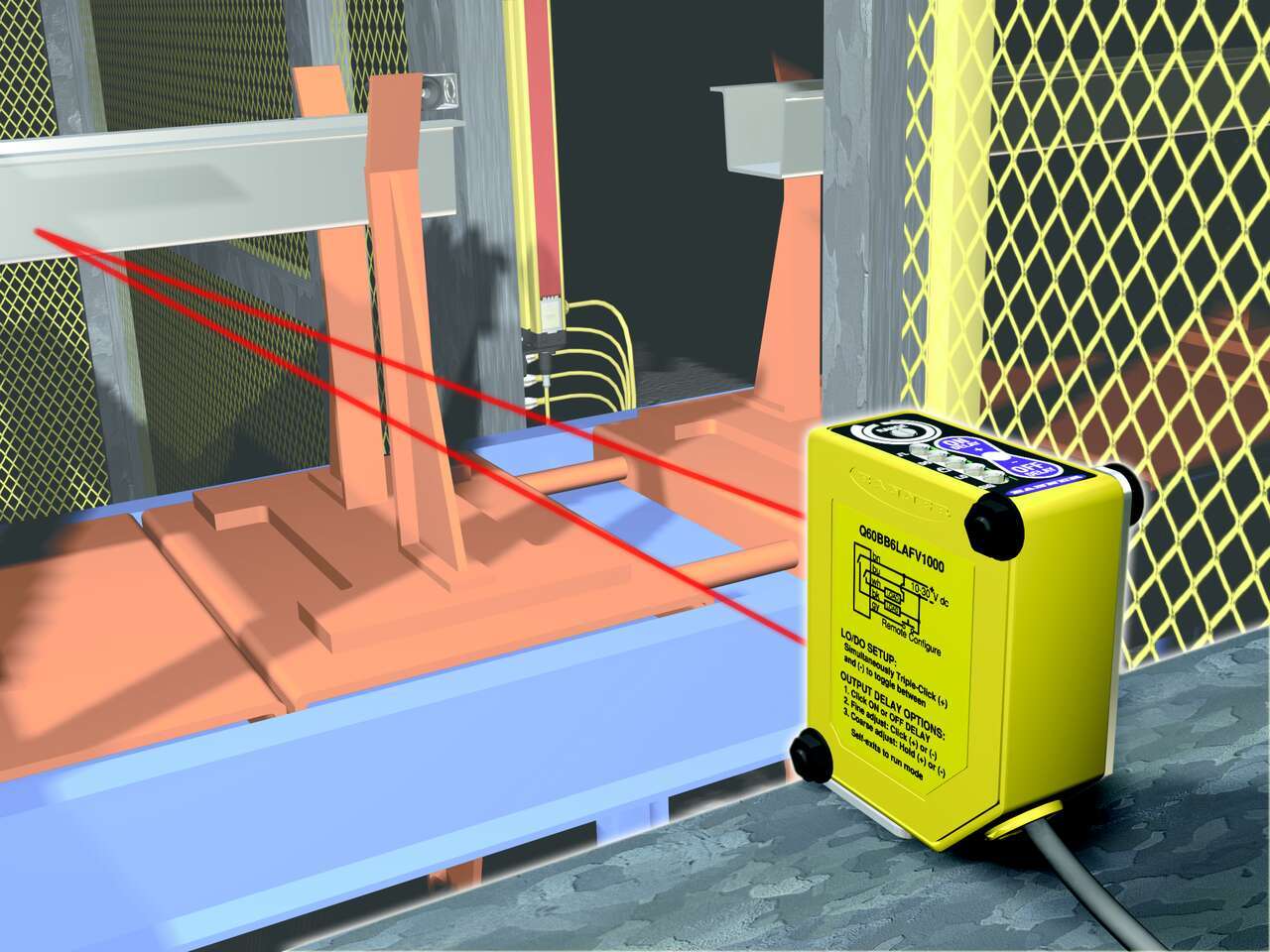
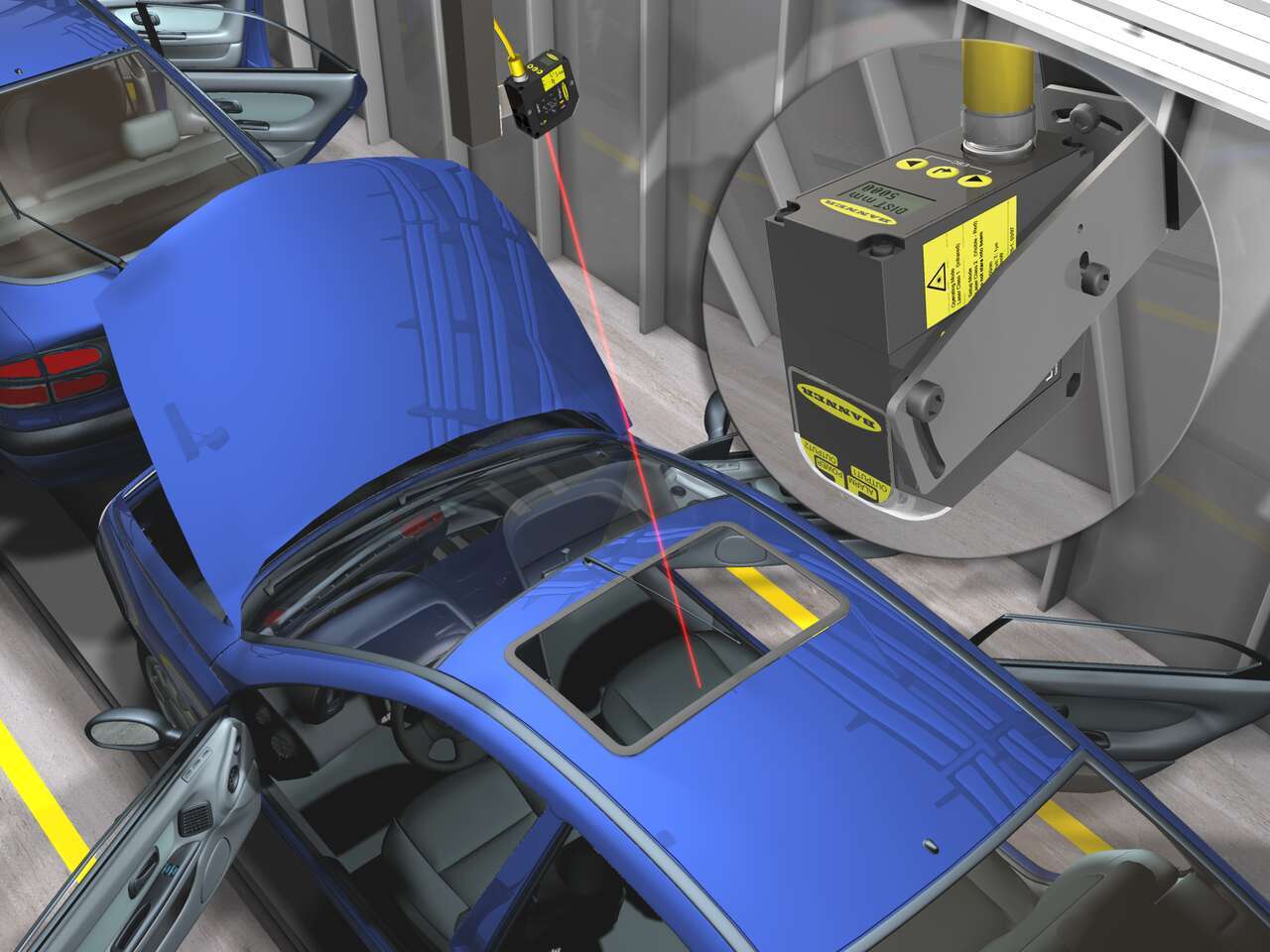
Precise Vehicle Positioning in Extreme Car Wash
-
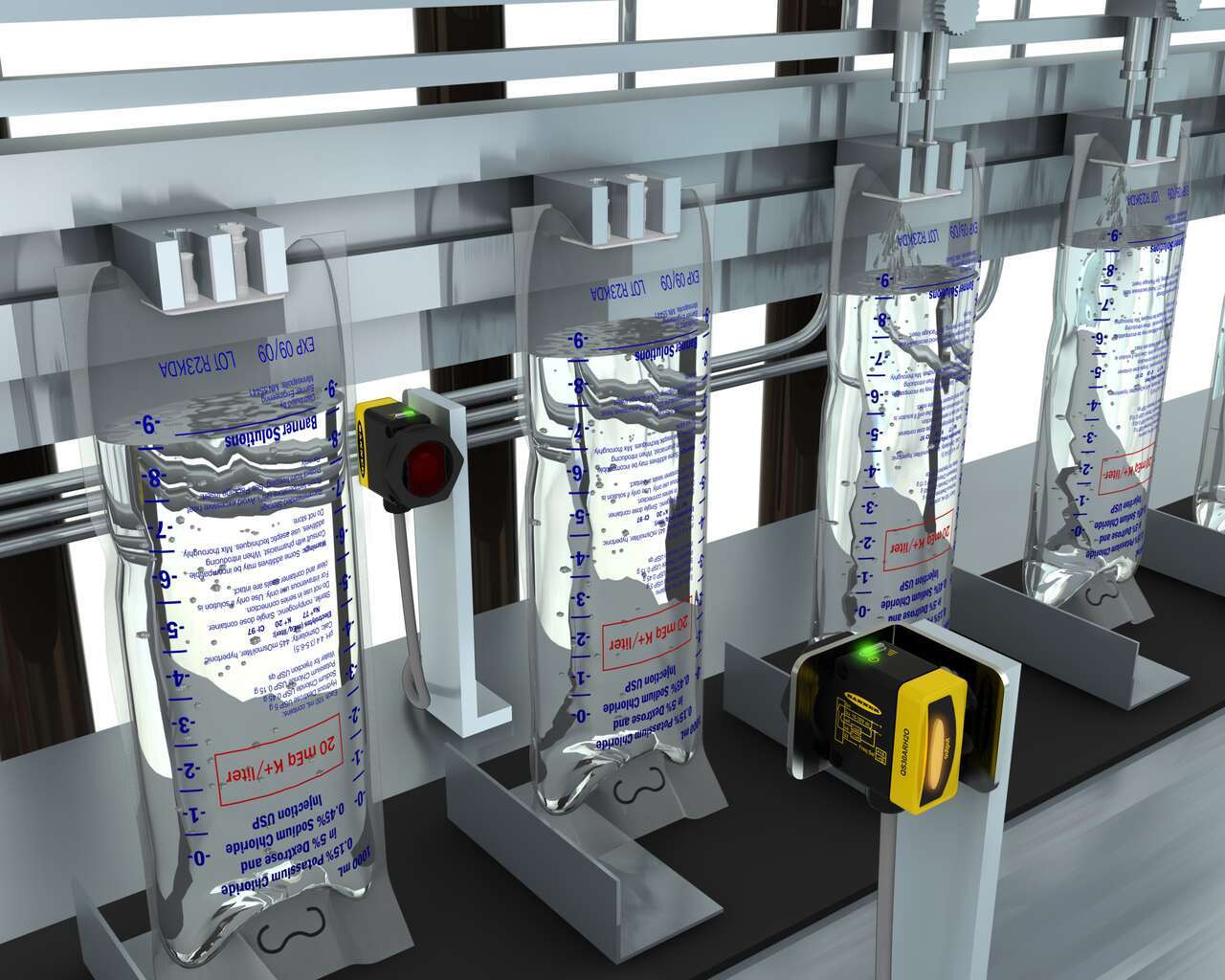
Bottle Fill Level Detection
-
Long-Range Feature Detection
-

Black Plastic Tray Detection at a Hopper and Filling Station
-
Detecting Black Parts on Black Door Panel
-
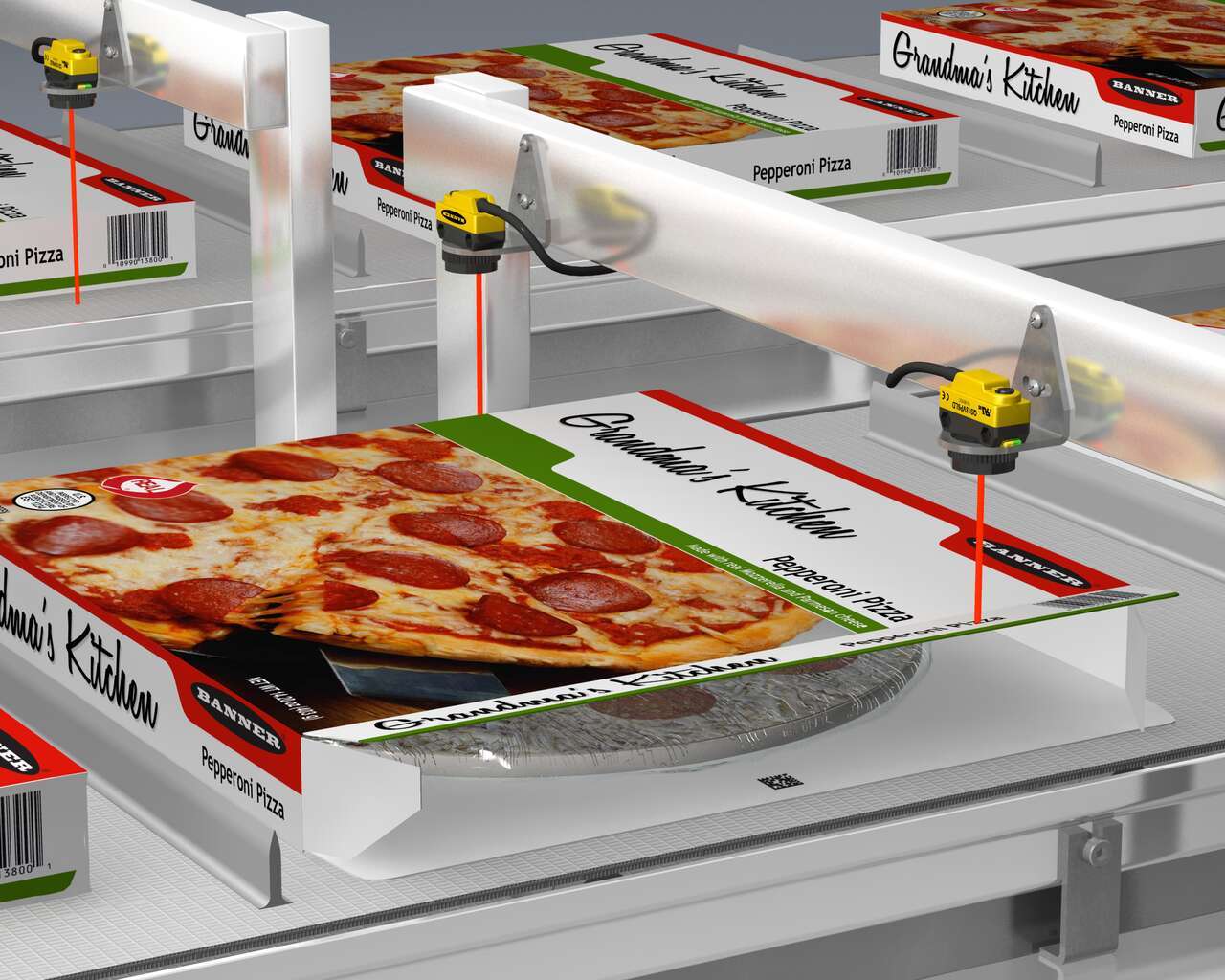
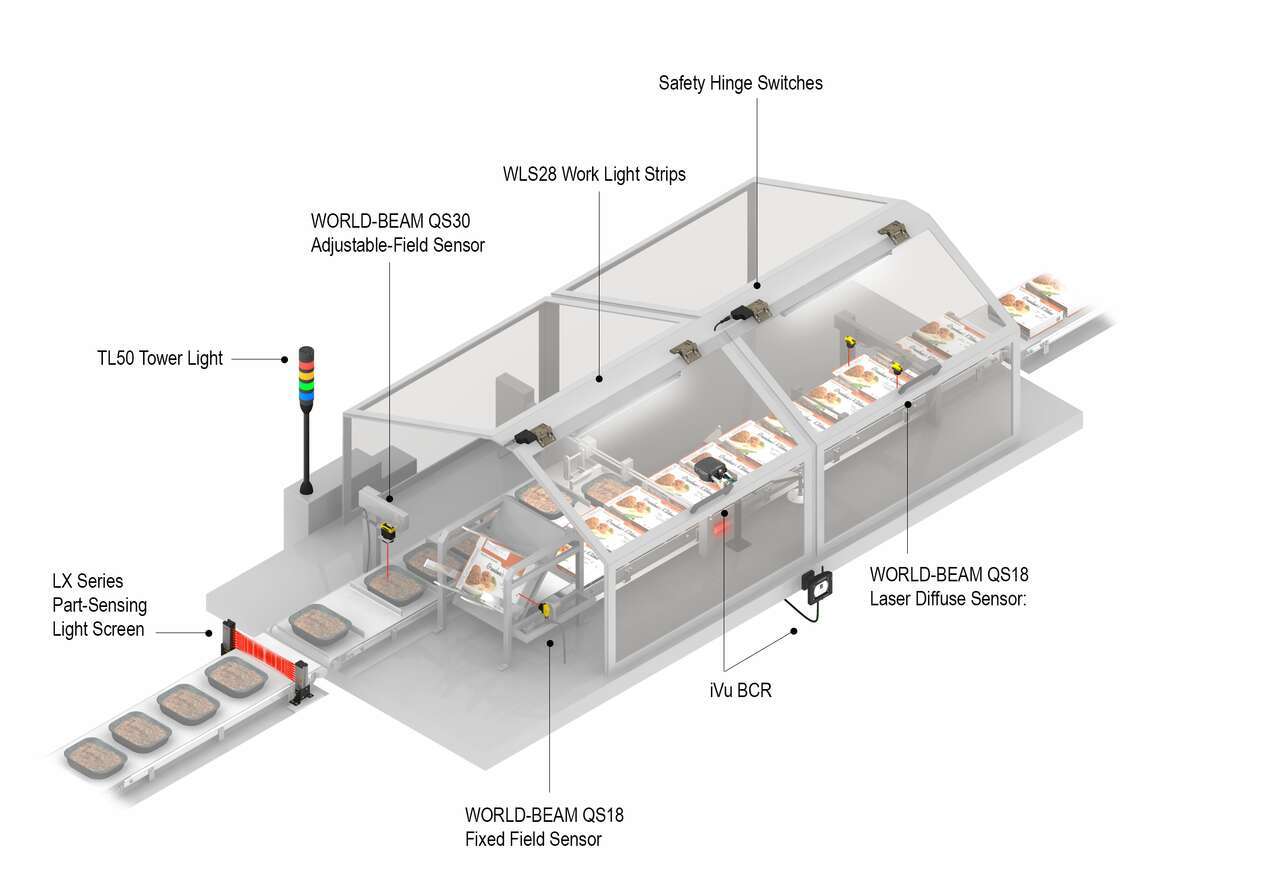
Flap Detection on Packaged Frozen Dinners
-

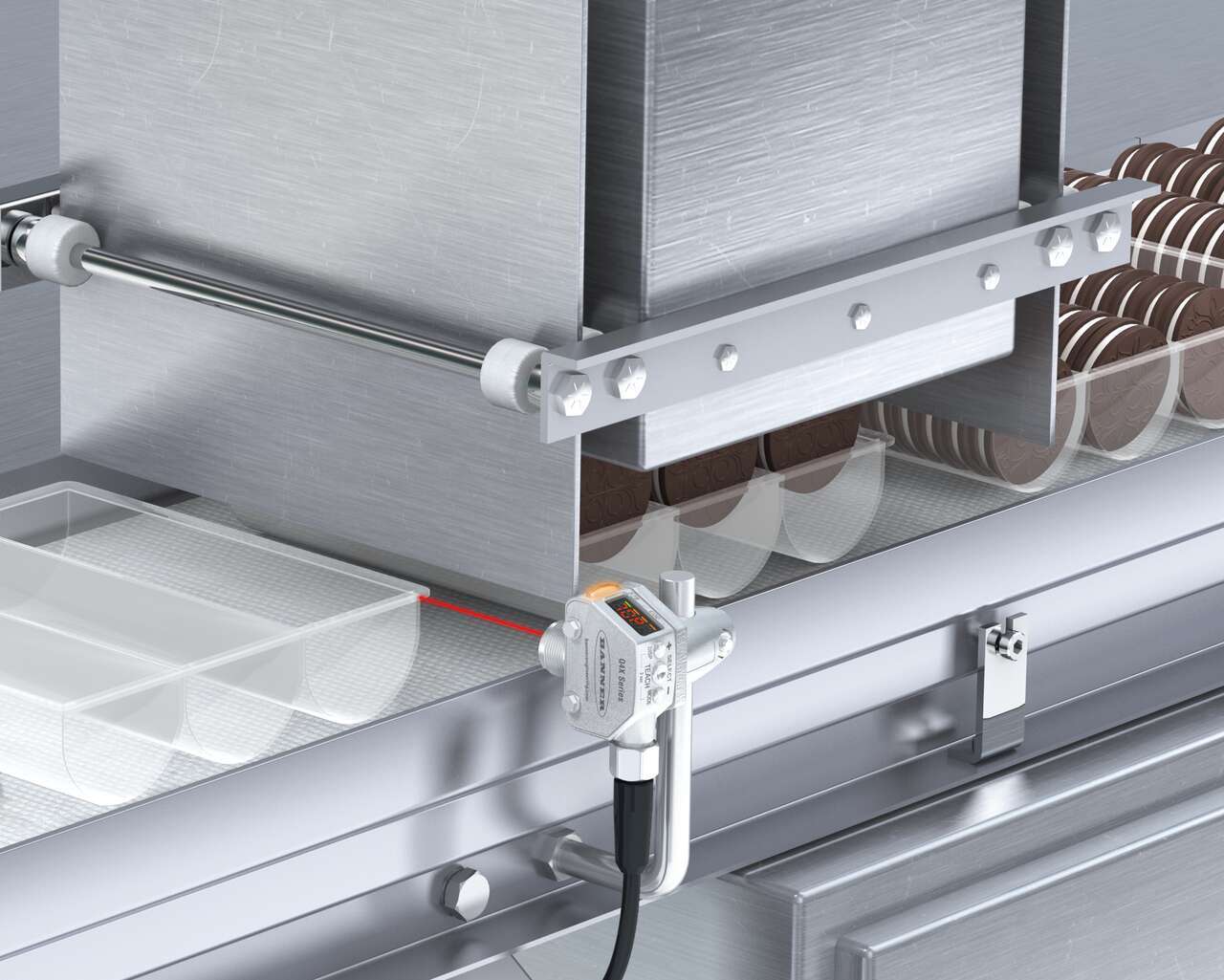
Inspecting for Missing Chocolates on a Packaging Line
-
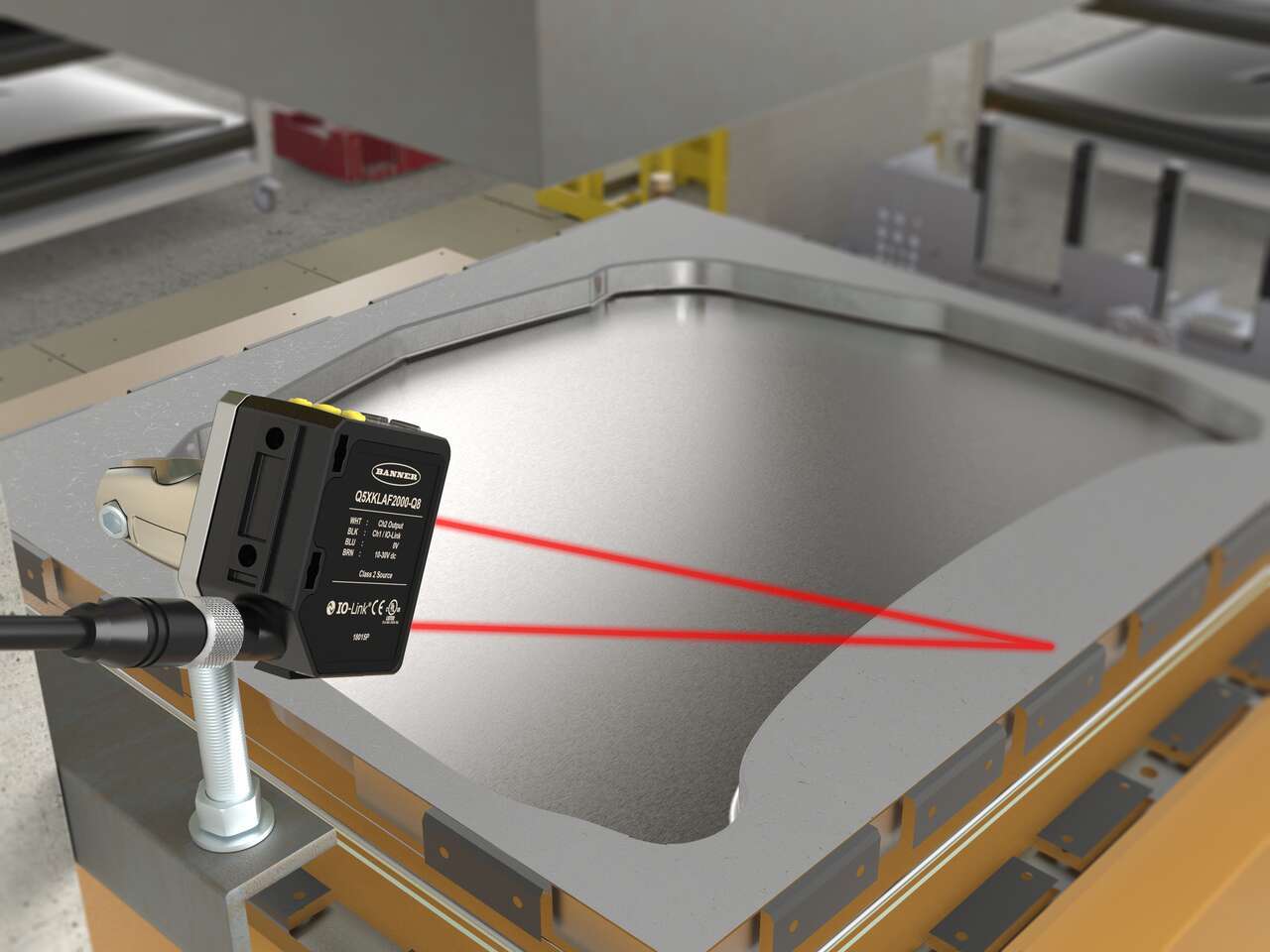
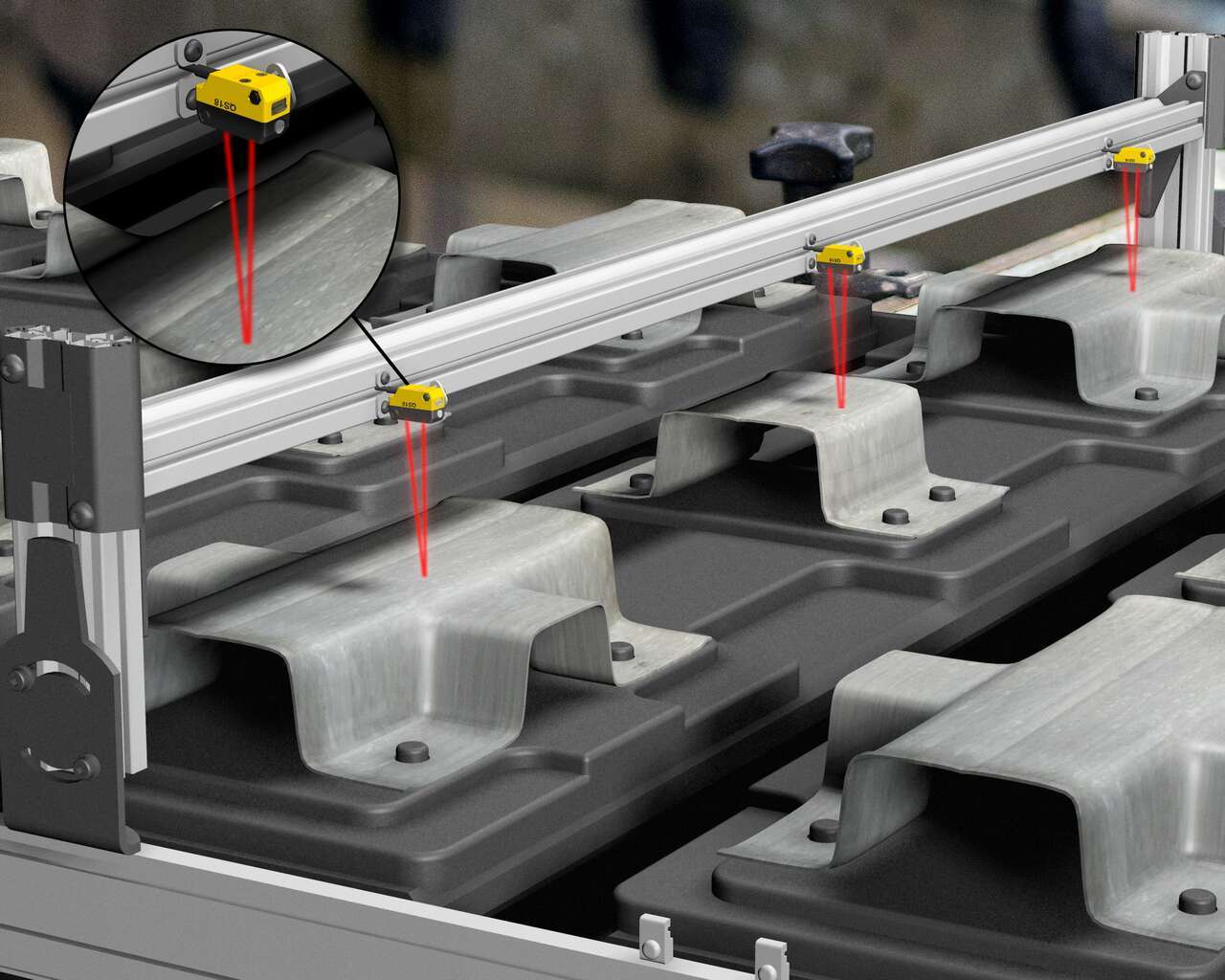
Verifying Metal Sheets on a Stamping Press
-
Color Sorting
-
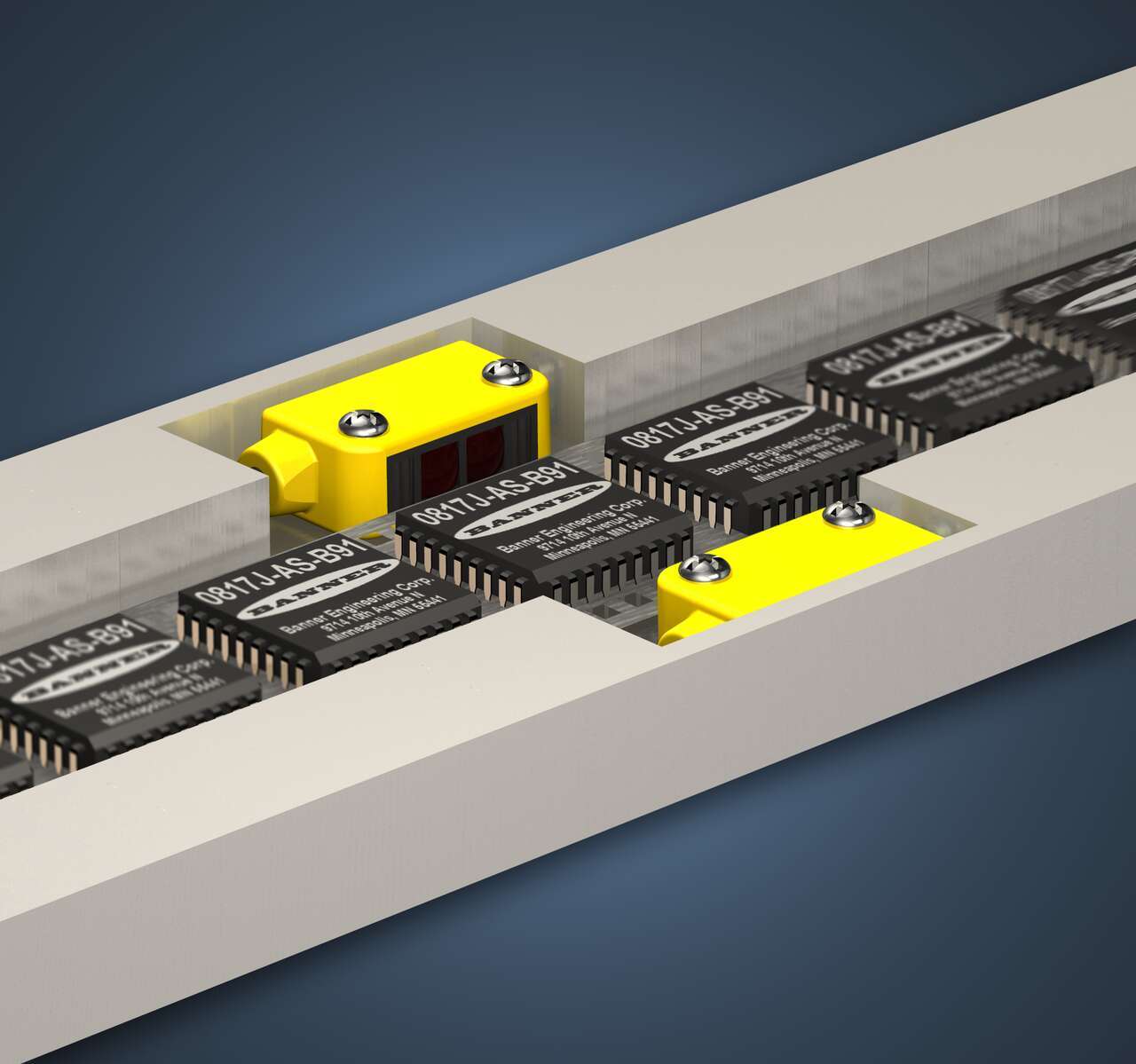
Counting Integrated Circuits
-

Counting Food Cartons for Correct Packaging
-
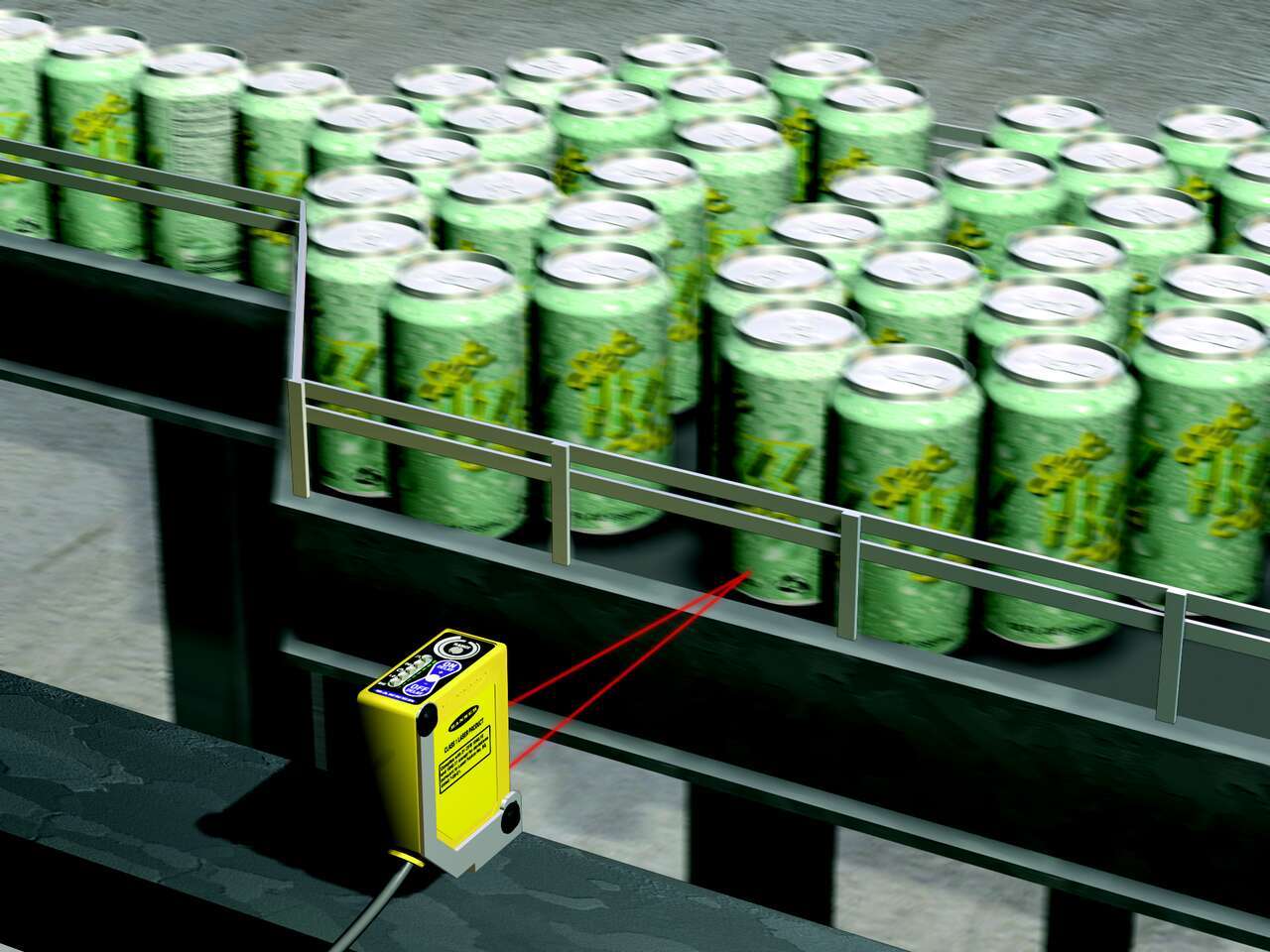
Soda Can Flow Control
-
Sortation Auto Induction Station
-
Sanitary Detection of Clear Plastic Food Containers
-

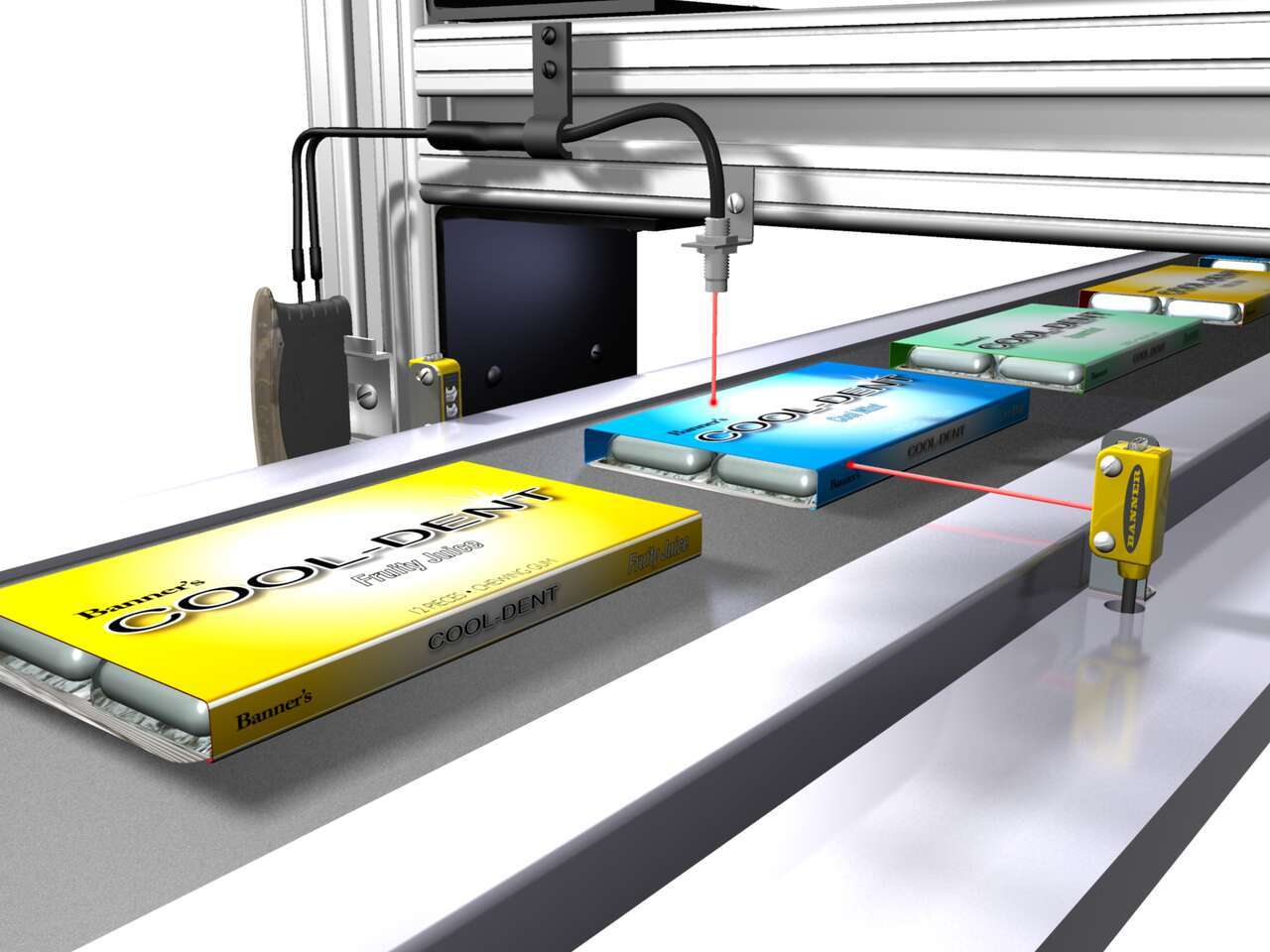
Multicolor Packaging
-
Level Measurement
-
Refrigerated Breakfast Roll Detection on Multi-Lane Conveyor
-
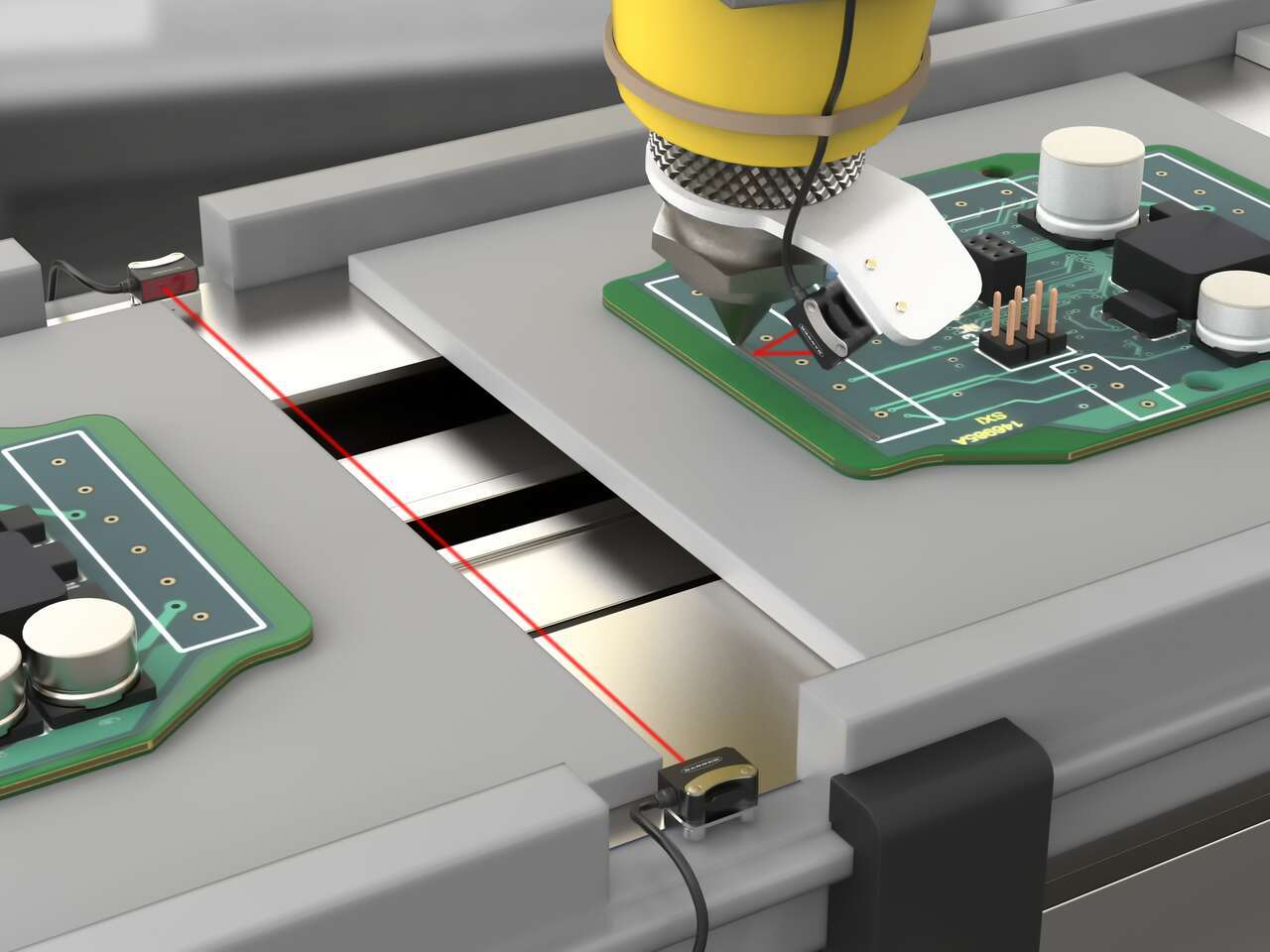
Real-Time Adhesive Detection in PCB Assembly
-

Package Inspection Using Diffuse-Mode Laser Sensors
-
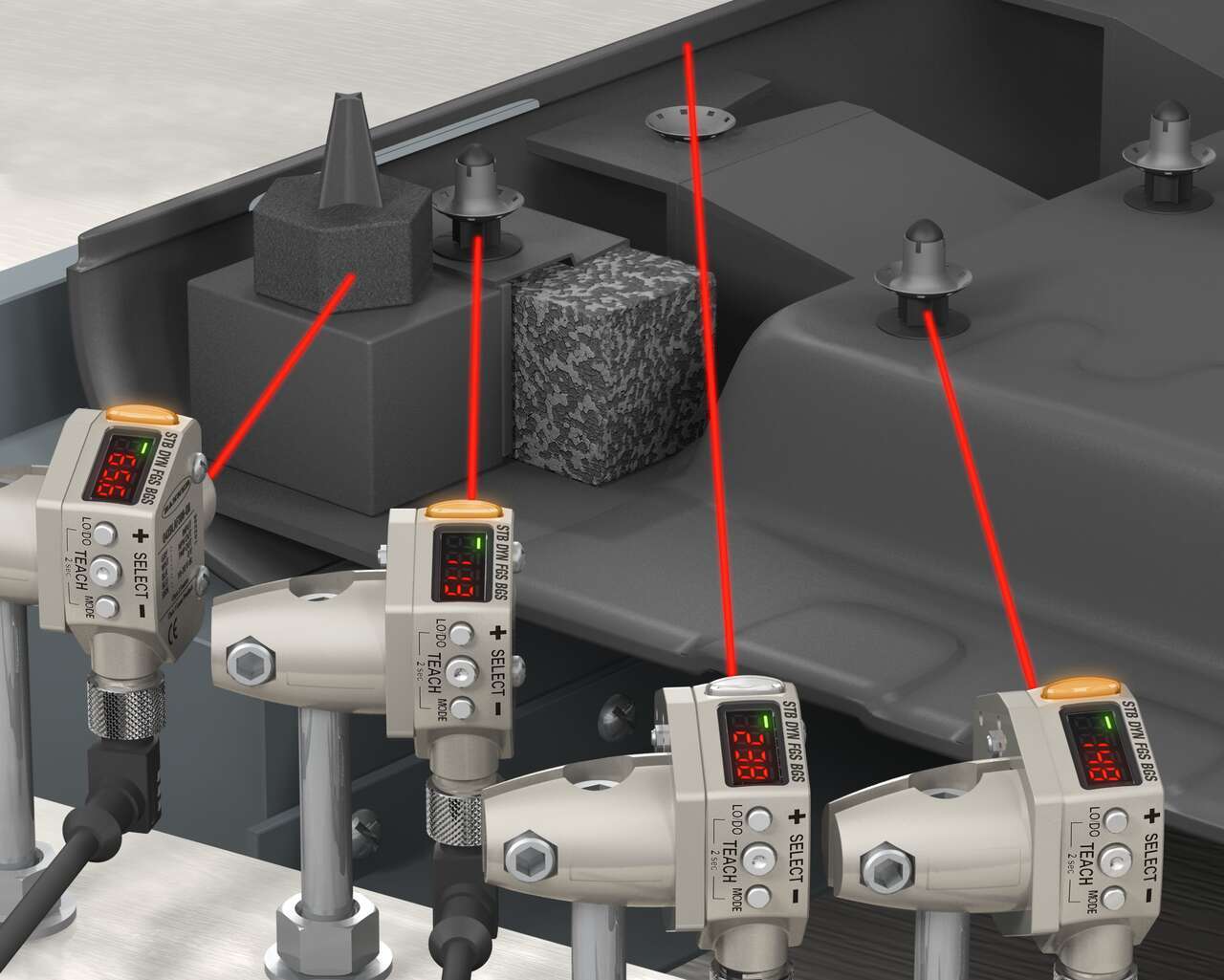
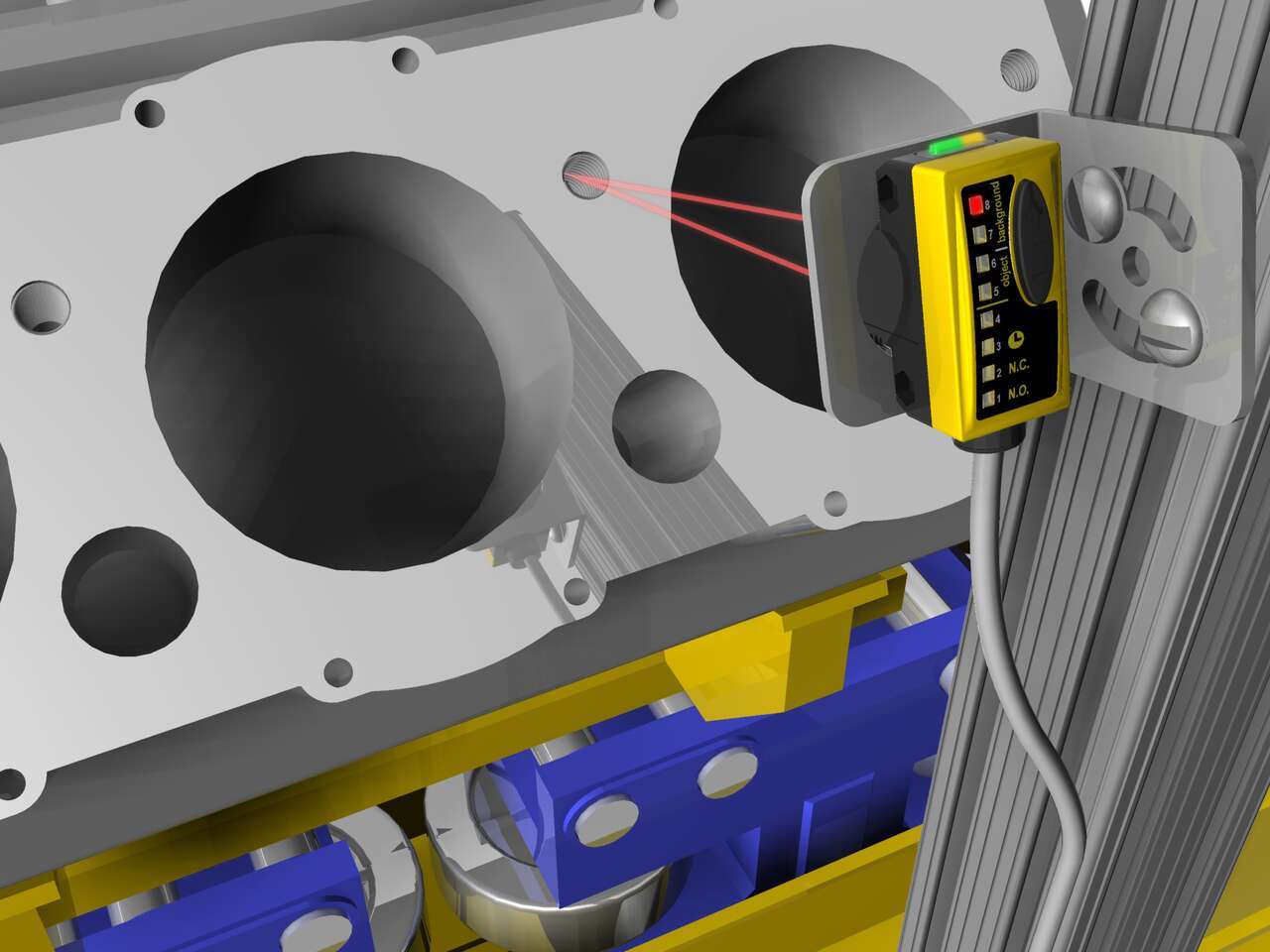
Rubber Washer Detection on Engine Block
-
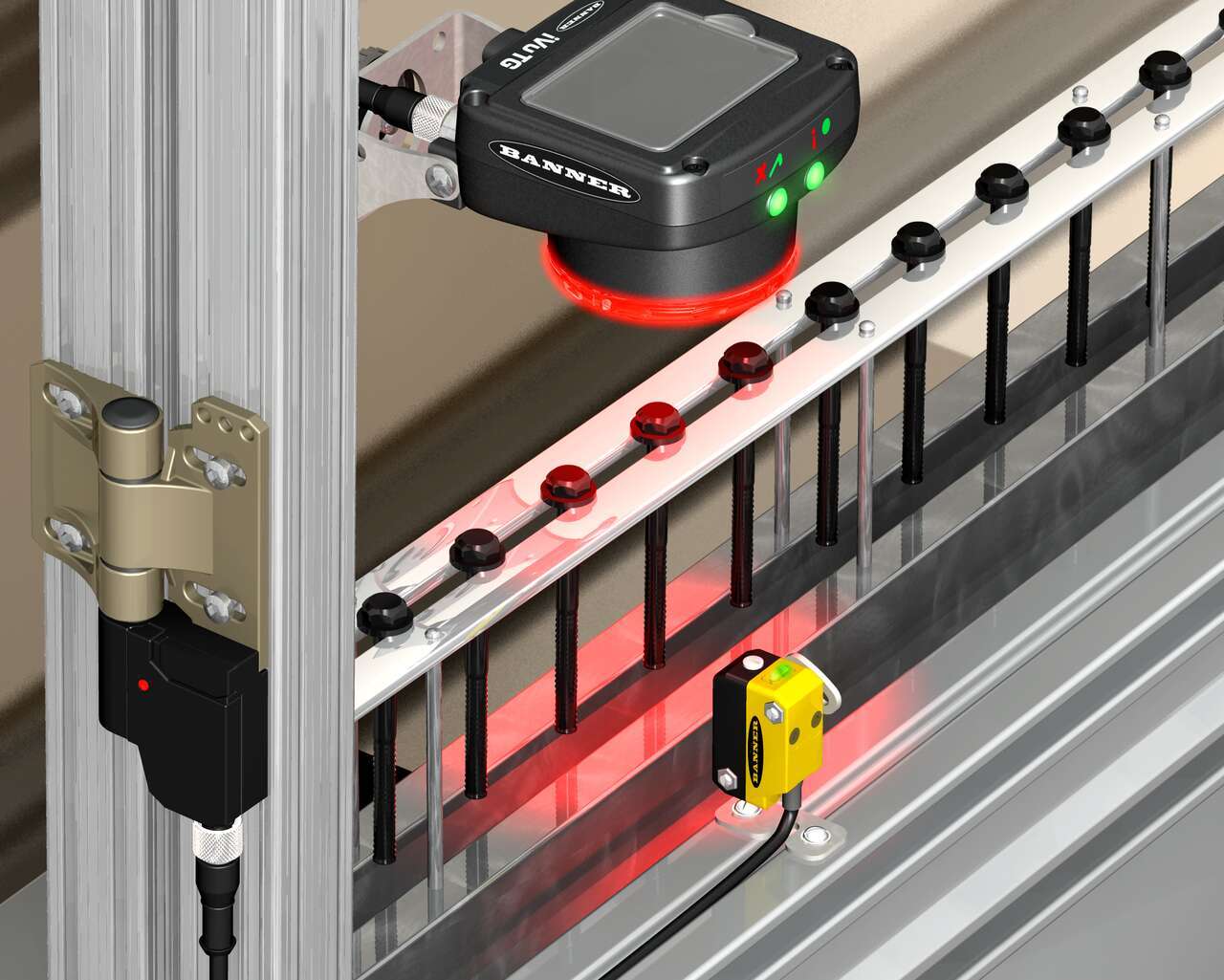
Close Proximity Error Proofing on Assembly Line
-

Hard Disk Detection
-
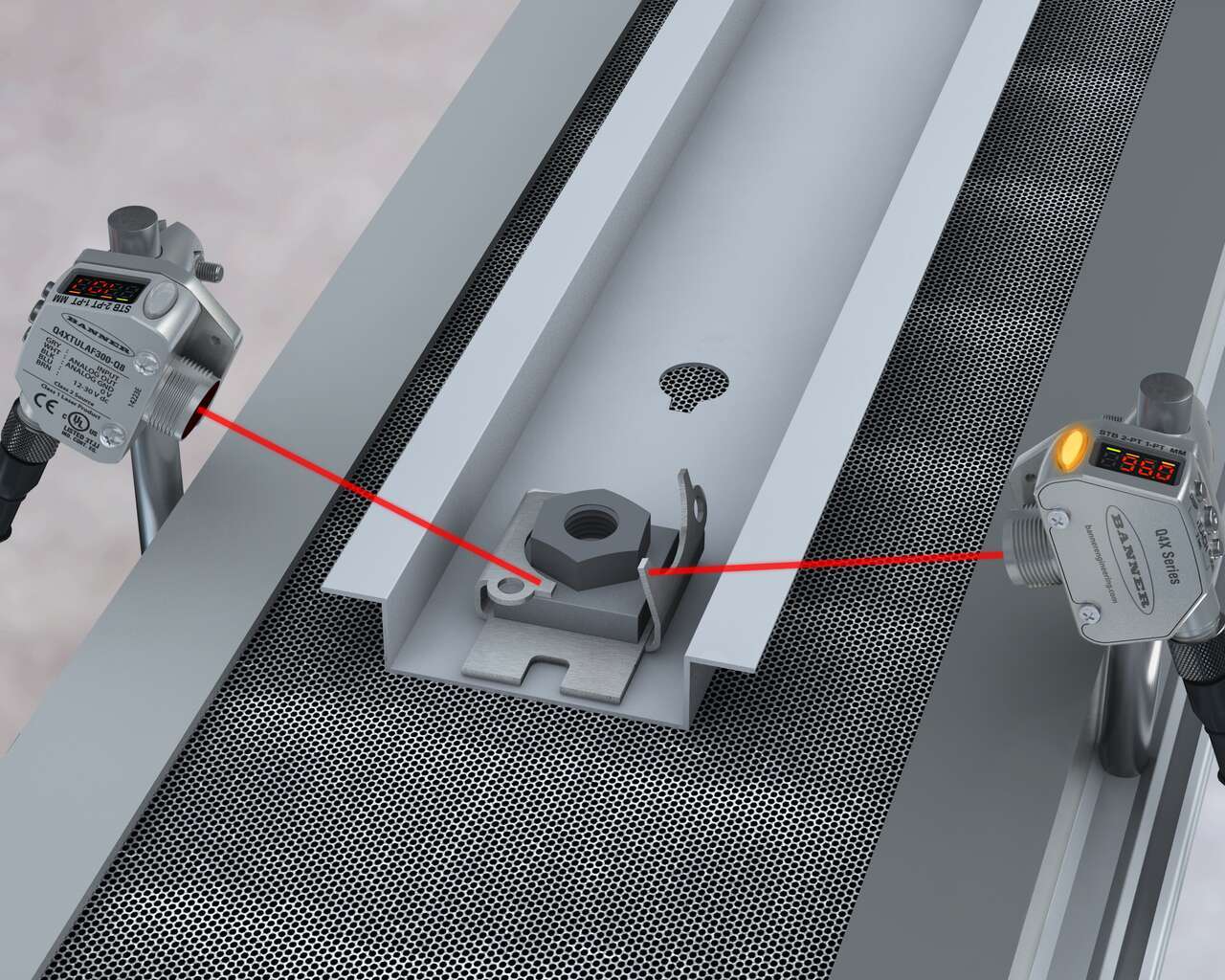
Parts Inspection on a Feeder Bowl Rail
-
Stack Height Detection of Metal Parts
-
Clear Tray Detection at Hopper Food Storage Units
-
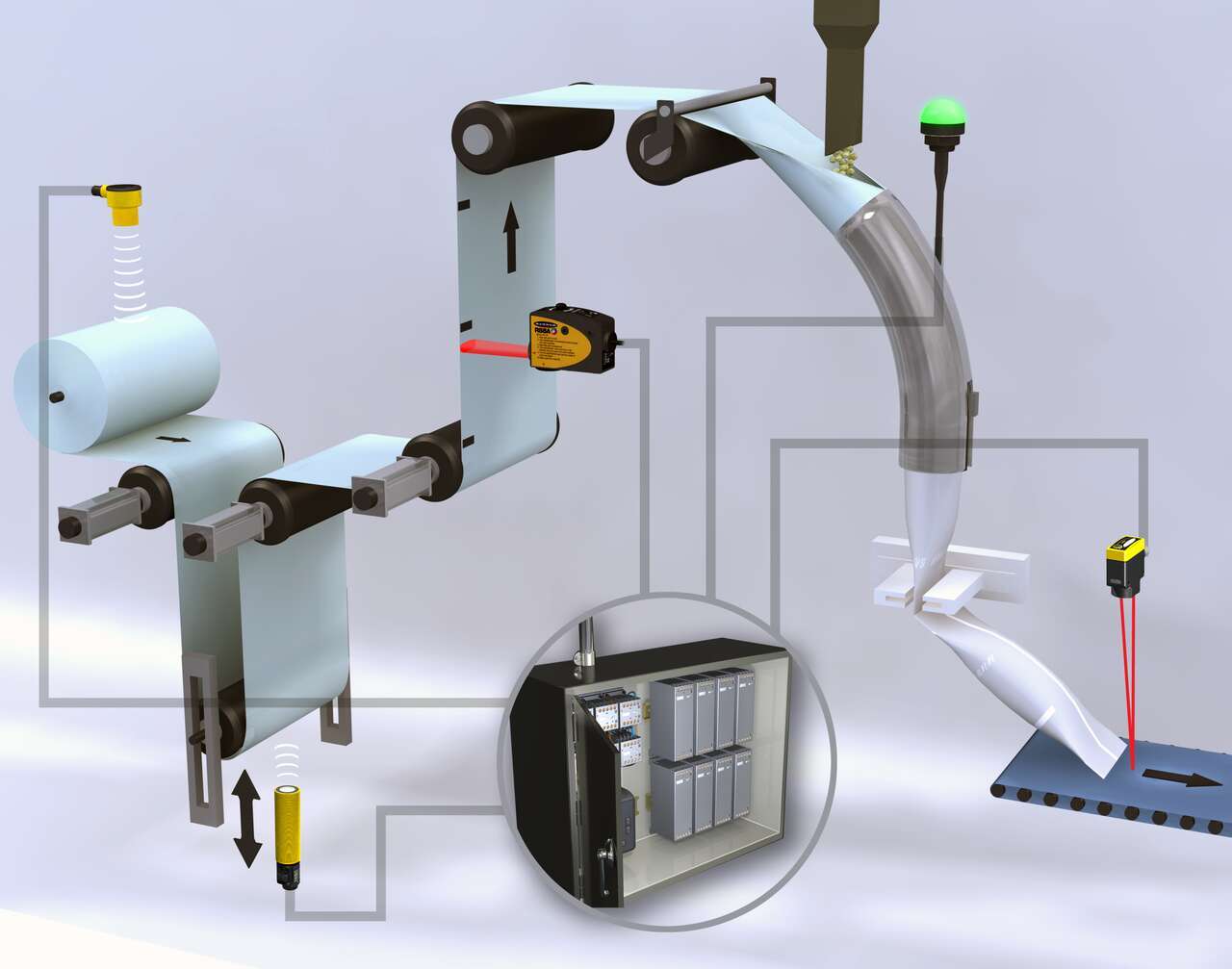
Vertical Form Fill Seal Machine Solutions
-

Error-Proofing Loading of IC Chips into Pocket Tape
-

Track Vials Through an Automated Clinical Laboratory
-

Labeling Detection
-

Cap Inspection in Confined Areas
-
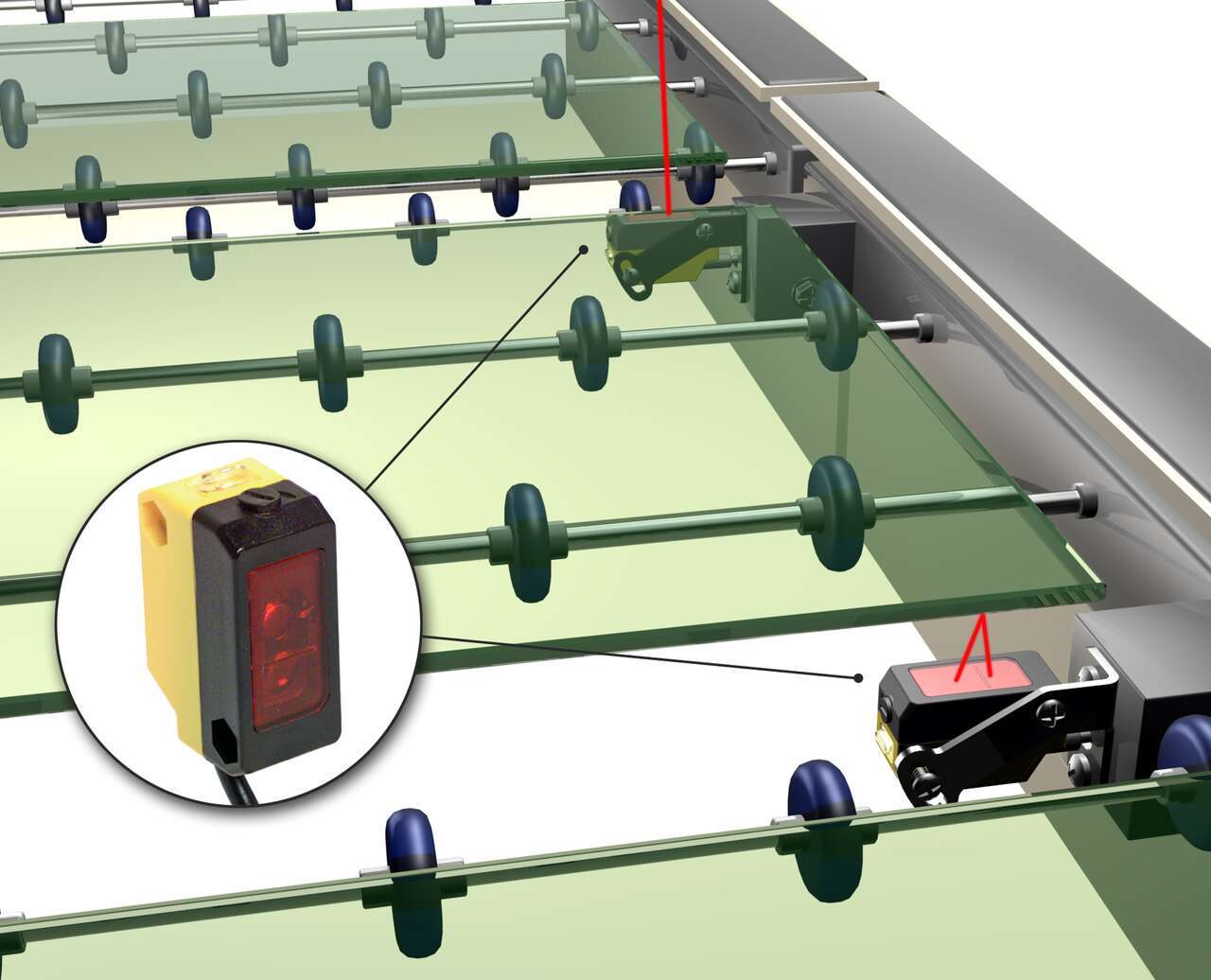
Detecting Glass Panels
-

Parts Detection in a Feeder Bowl
-

Motor Detection
-
Bottle Label Verification
-

Detecting Items On an AC-Powered Conveyor
-
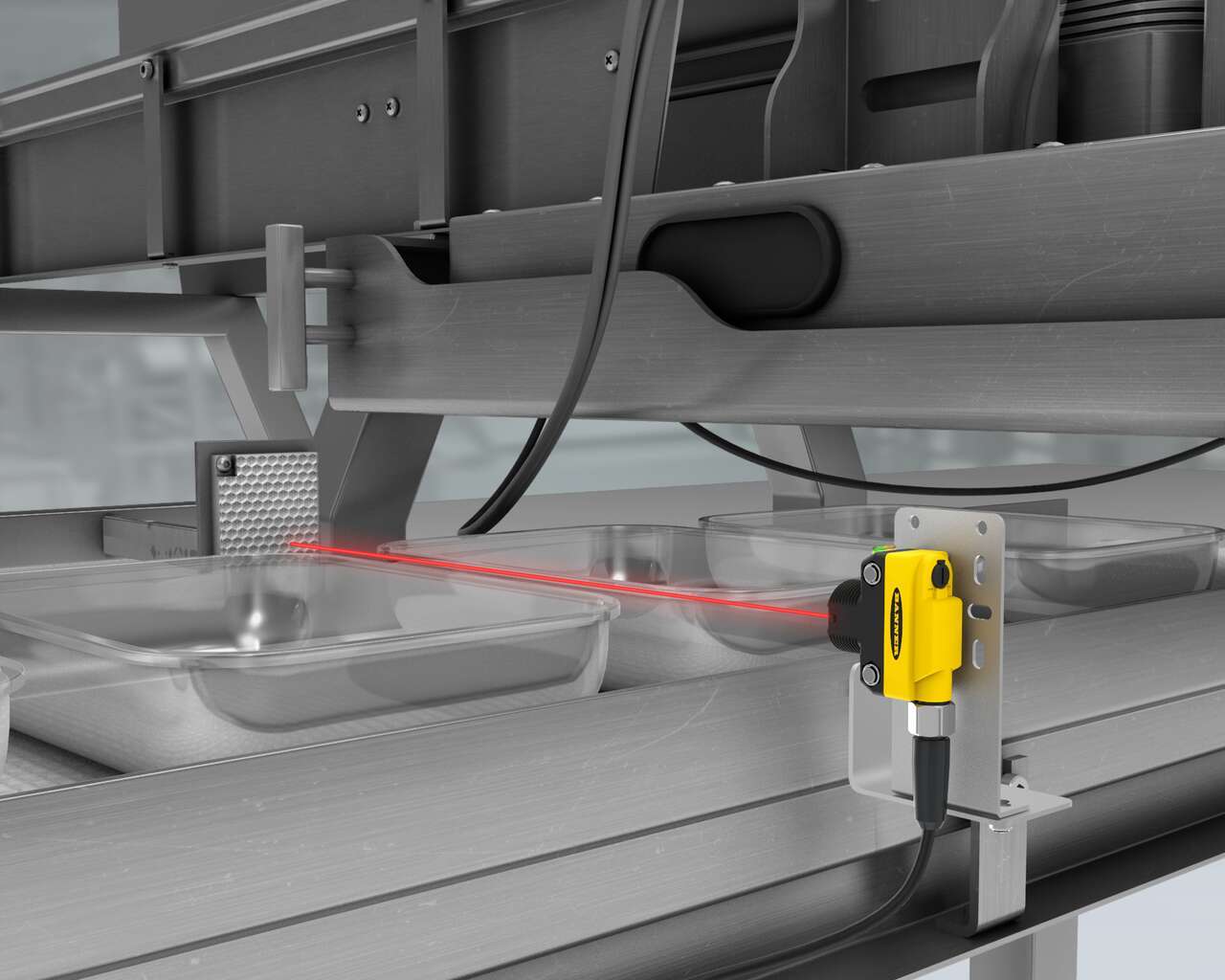
Controlling Line Pressure of Clear Food Trays at Denester
-

Detecting Reflective Packages on a Conveyor
-
Counting Transparent Plastic Containers on a Conveyor
-

Clear Glass Jar Detection for Food and Beverage Splash Zone
-

Accurate Counting of Transparent Pharmaceutical Bottles
-

Detecting Tipped-Over Bottles on a High-Speed Bottling Line
-
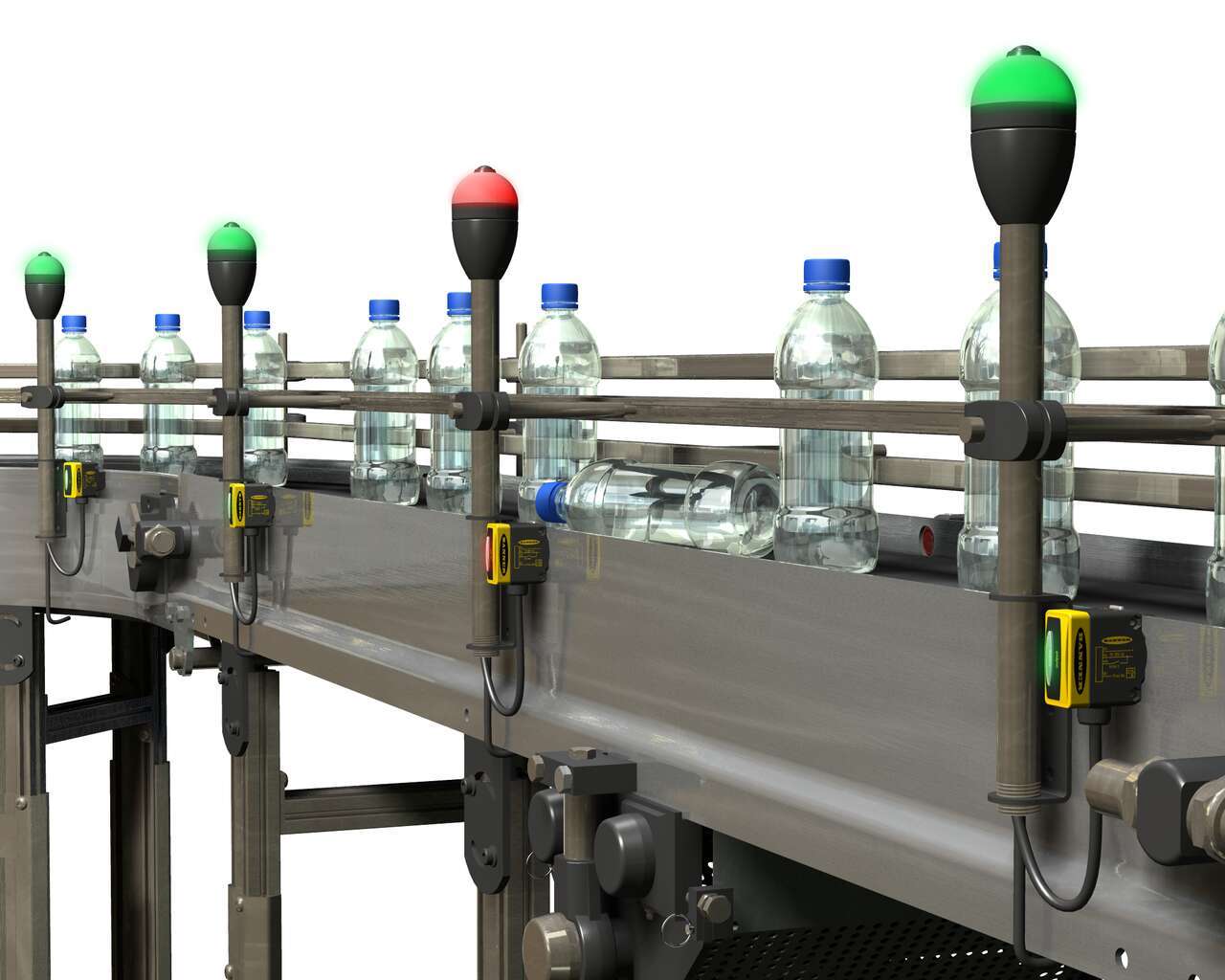
Detecting and Indicating the Presence of a Tipped Bottle
-
Detection of Clear Liquids in Transparent Packaging
-

Carton Stack Height
-
Shuttle Tote Positioning
-

Juice Carton Detection
-

Extendable Reach Conveyor
-

Exit Chute Jam Indication
-

Parcel Collision Avoidance
-
Inspection Trigger in Printing
-

Conveyor Jam Detection
-
Baggage Handling
-
Counting Memory Sticks
-

Detecting Bottles in Washdown: Glass & PET Plastic
-
Detecting Transparent Bottles in a Washdown Environment
-
In-Line Accumulation on Single Filer
-

Detecting PET Bottles to Regulate Product Flow
-

Non-Contact Fill Level Verification
-

Monitoring Plastic Tray Levels on a Denester Machine
-
Cap Orientation Verification
-
Detection of Cap Orientation
-
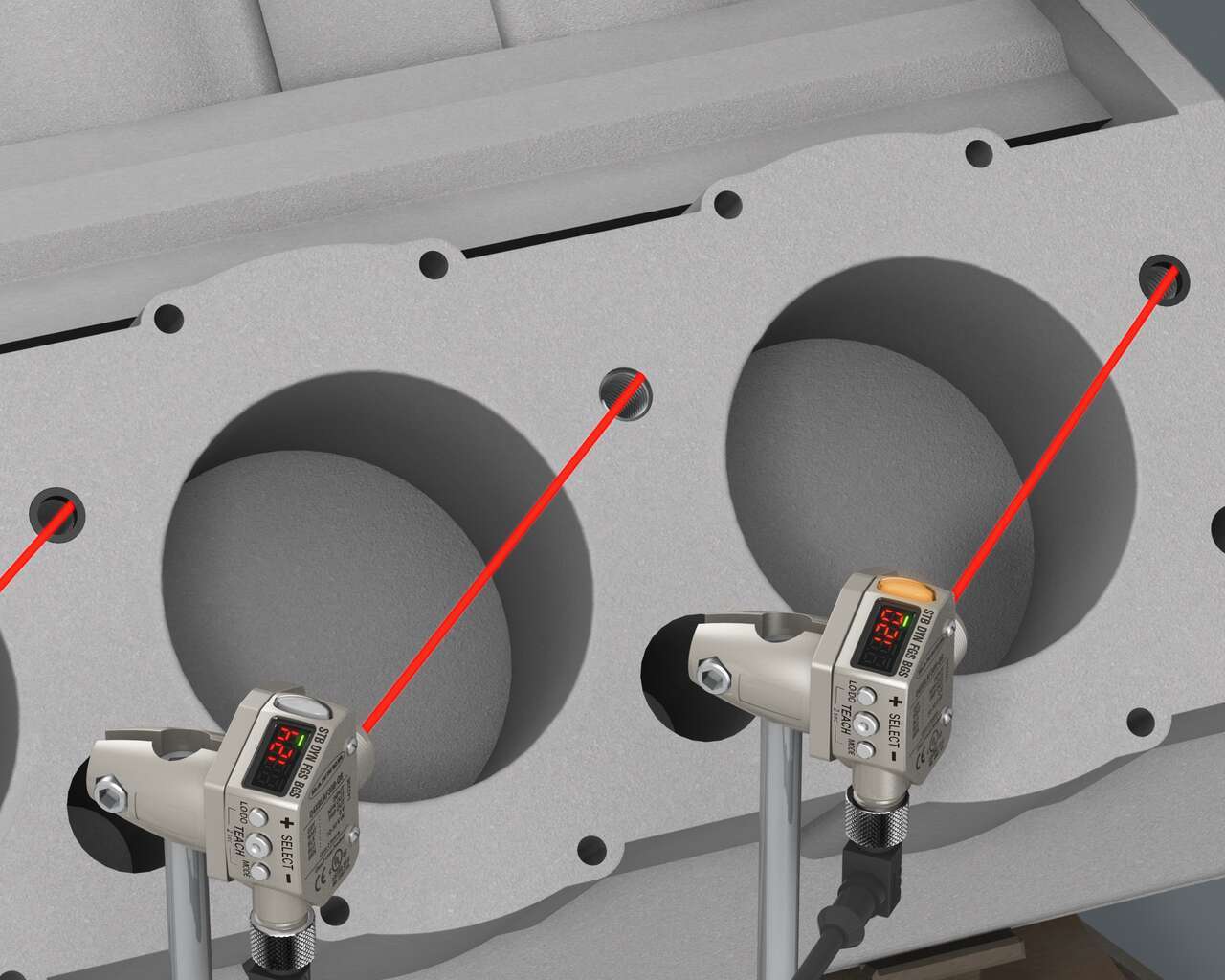
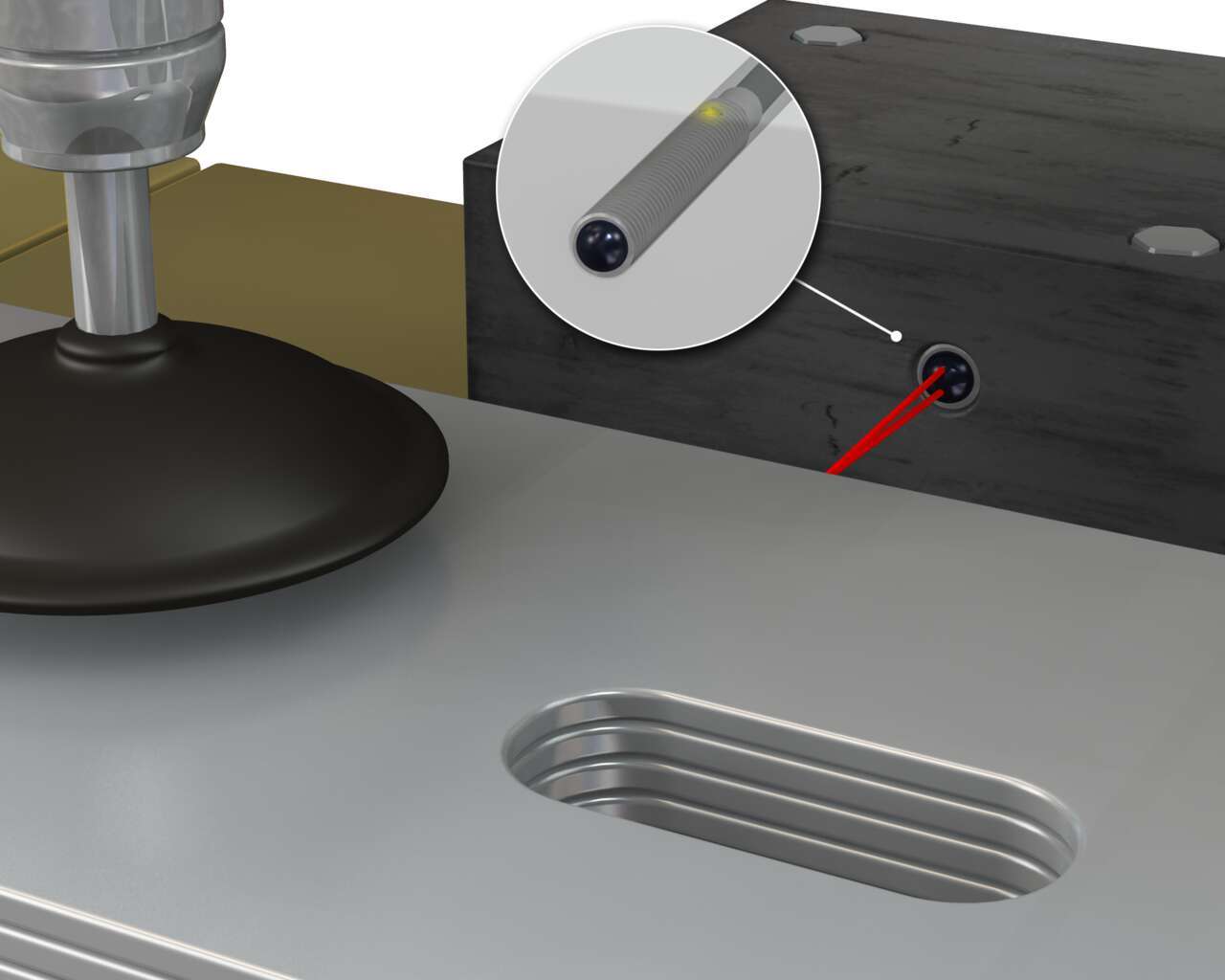
Thread Hole Detection
-
Black O-Ring Detection
-

Car Wash
-

Fill Level Verification of Water Bottles
-

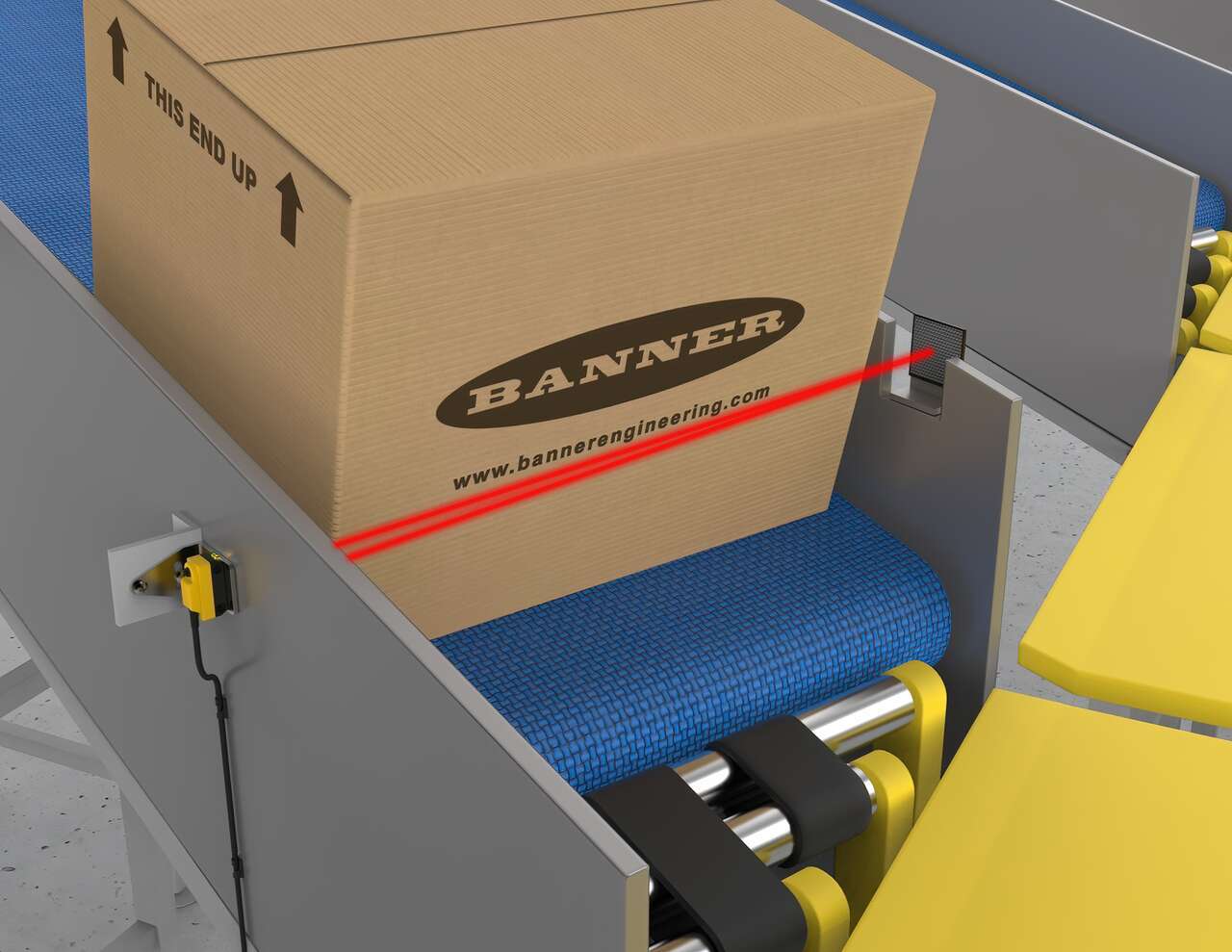
Detecting Different Size Packages on a Conveyor
-

Monitoring Clear Film in a Tray Sealer
-

Bottle Cap Inspection
-

Detecting Bottle Caps of Various Colors
-

Carton Trigger For Date/Lot Code Printing
-
Packaging Frozen Dinners on a Cartoner
-

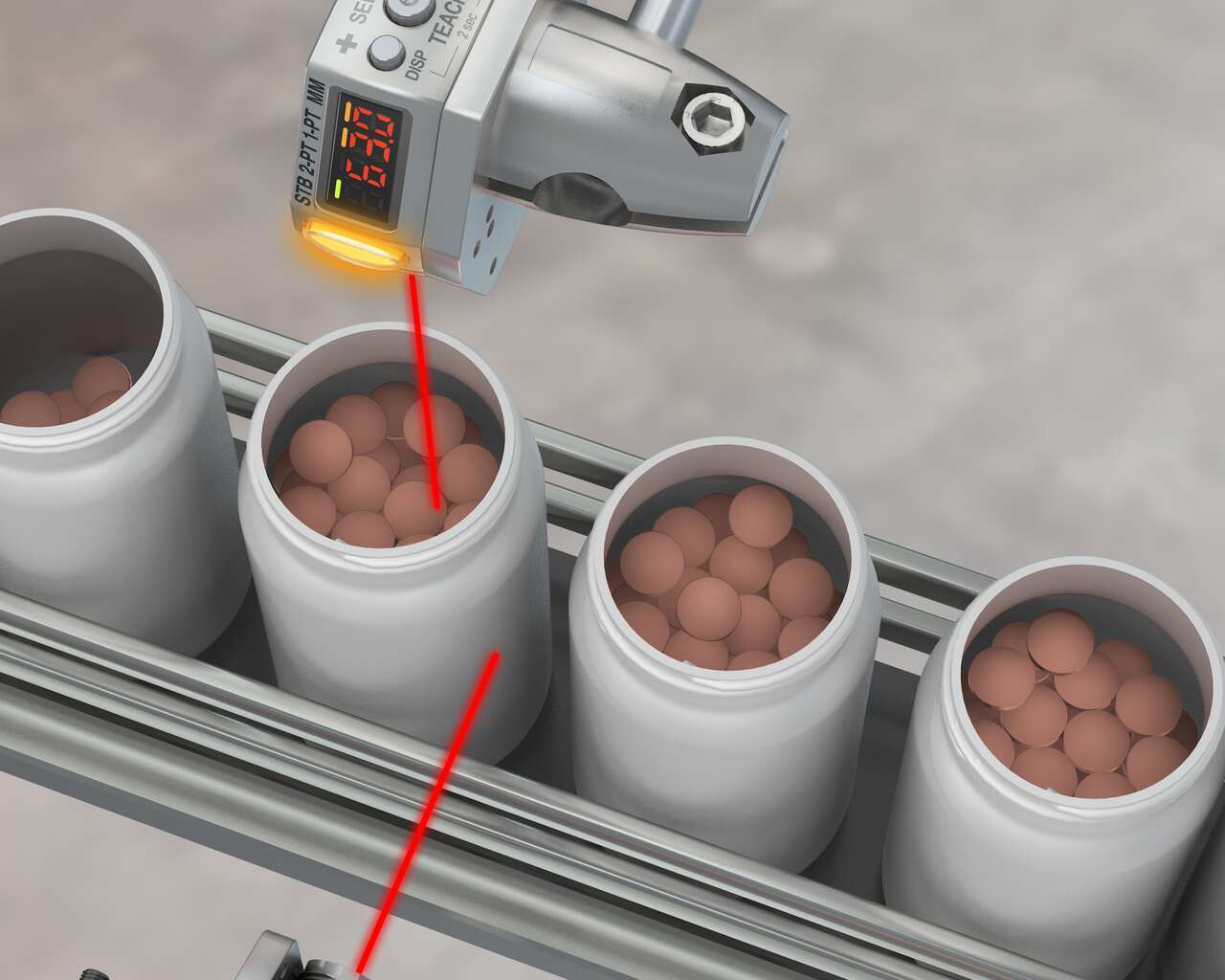
Medicine Bottle Detection for Filling
-

Mail Sorting for Size
-
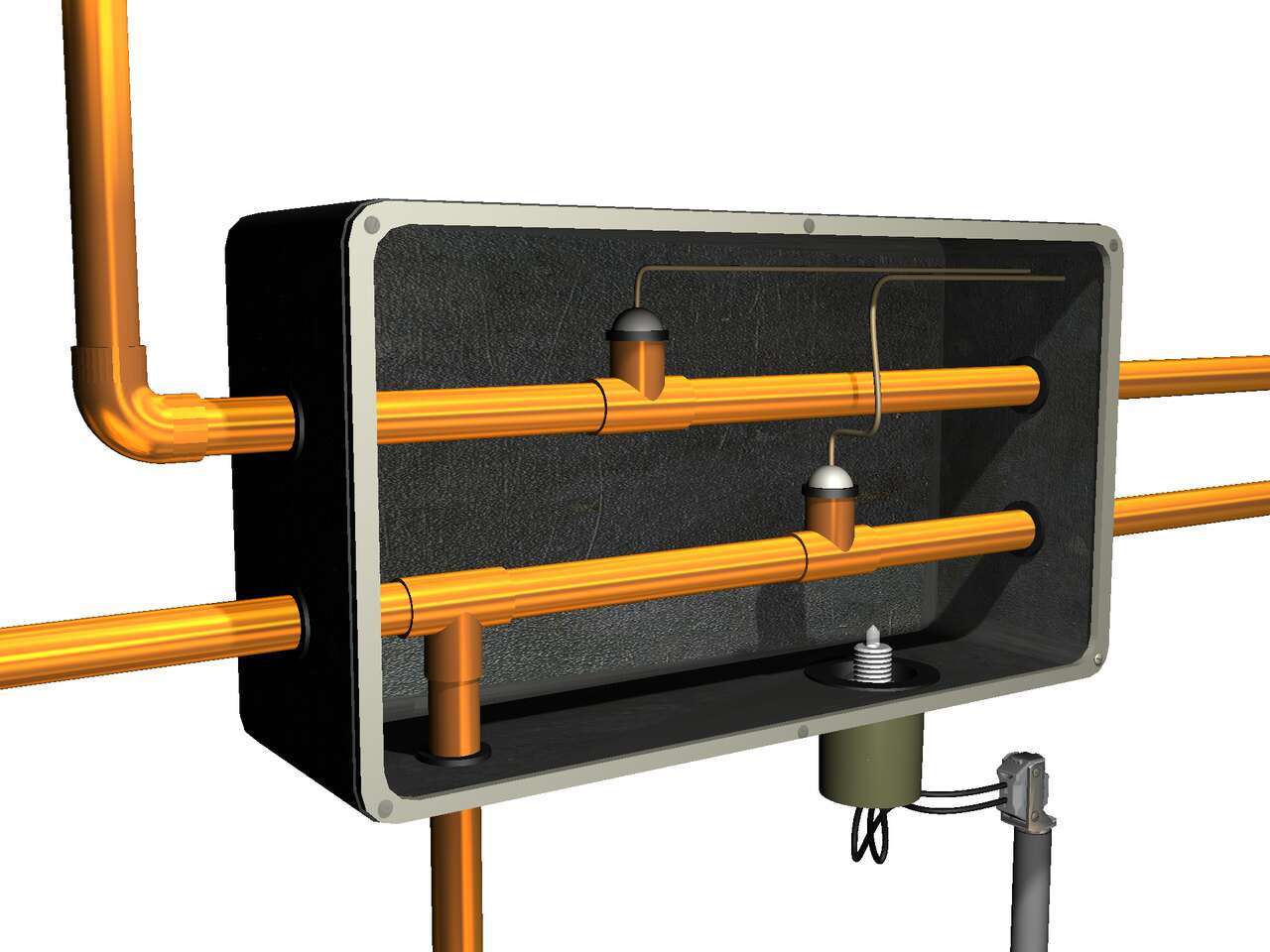
Liquid Leak Detection with a QS18
-
Counting Syringes Using Background Suppression
Resources
The latest Photoelectric Sensors Solutions brochure explores the many different types of Banner sensors and how to choose the right one for your application, whether it be object counting, quality control, object presence or absence, or other automation need.
